Организация памяти процесса

Управление памятью – центральный аспект в работе операционных систем. Он оказывает основополагающее влияние на сферу программирования и системного администрирования. В нескольких последующих постах я коснусь вопросов, связанных с работой памяти. Упор будет сделан на практические аспекты, однако и детали внутреннего устройства игнорировать не будем. Рассматриваемые концепции являются достаточно общими, но проиллюстрированы в основном на примере Linux и Windows, выполняющихся на x86-32 компьютере. Первый пост описывает организацию памяти пользовательских процессов.
Каждый процесс в многозадачной ОС выполняется в собственной “песочнице”. Эта песочница представляет собой виртуальное адресное пространство, которое в 32-битном защищенном режиме всегда имеет размер равный 4 гигабайтам. Соответствие между виртуальным пространством и физической памятью описывается с помощью таблицы страниц (page table). Ядро создает и заполняет таблицы, а процессор обращается к ним при необходимости осуществить трансляцию адреса. Каждый процесс работает со своим набором таблиц. Есть один важный момент — концепция виртуальной адресации распространяется на все выполняемое ПО, включая и само ядро. По этой причине для него резервируется часть виртуального адресного пространства (т.н. kernel space).
Это конечно не значит, что ядро занимает все это пространство, просто данный диапазон адресов может быть использован для мэппирования любой части физического адресного пространства по выбору ядра. Страницы памяти, соответствующие kernel space, помечены в таблицах страниц как доступные исключительно для привилегированного кода (кольцо 2 или более привилегированное). При попытке обращения к этим страницам из user mode кода генерируется page fault. В случае с Linux, kernel space всегда присутствует в памяти процесса, и разные процессы мэппируют kernel space в одну и ту же область физической памяти. Таким образом, код и данные ядра всегда доступны при необходимости обработать прерывание или системный вызов. В противоположность, оперативная память, замэппированная в user mode space, меняется при каждом переключении контекста.

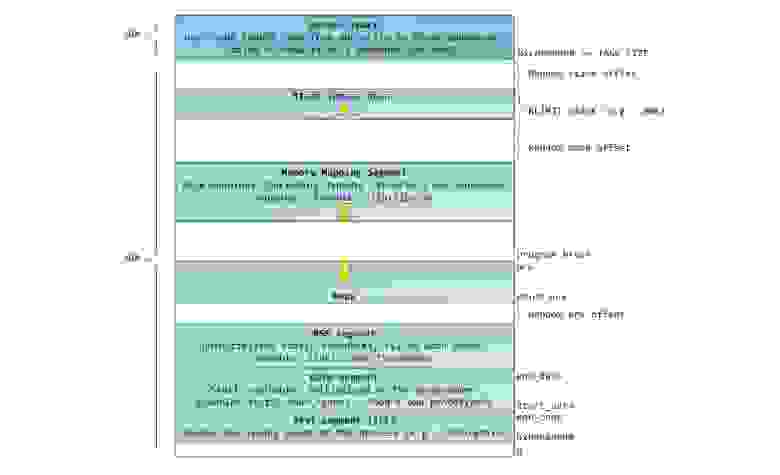
Синим цветом на рисунке отмечены области виртуального адресного пространства, которым в соответствие поставлены участки физической памяти; белым цветом — еще не использованные области. Как видно, Firefox использовал большую часть своего виртуального адресного пространства. Все мы знаем о легендарной прожорливости этой программы в отношении оперативной памяти. Синие полосы на рисунке — это сегменты памяти программы, такие как куча (heap), стек и так далее. Обратите внимание, что в данном случае под сегментами мы подразумеваем просто непрерывные адресные диапазоны. Это не те сегменты, о которых мы говорим при описании сегментации в Intel процессорах. Так или иначе, вот стандартная схема организации памяти процесса в Linux:
Давным давно, когда компьютерная техника находилась в совсем еще младенческом возрасте, начальные виртуальные адреса сегментов были совершенно одинаковыми почти для всех процессов, выполняемых машиной. Из-за этого значительно упрощалось удаленное эксплуатирование уязвимостей. Эксплойту часто необходимо обращаться к памяти по абсолютным адресам, например по некоторому адресу в стеке, по адресу библиотечной функции, и тому подобное. Хакер, рассчитывающий осуществить удаленную атаку, должен выбирать адреса для обращения в слепую в расчете на то, что размещение сегментов программы в памяти на разных машинах будет идентичным. И когда оно действительно идентичное, случается, что людей хакают. По этой причине, приобрел популярность механизм рандомизации расположения сегментов в адресном пространстве процесса. Linux рандомизирует расположение стека, сегмента для memory mapping, и кучи – их стартовый адрес вычисляется путем добавления смещения. К сожалению, 32-битное пространство не очень-то большое, и эффективность рандомизации в известной степени нивелируется.
В верхней части user mode space расположен стековый сегмент. Большинство языков программирования используют его для хранения локальных переменных и аргументов, переданных в функцию. Вызов функции или метода приводит к помещению в стек т.н. стекового фрейма. Когда функция возвращает управление, стековый фрейм уничтожается. Стек устроен достаточно просто — данные обрабатываются в соответствии с принципом «последним пришёл — первым обслужен» (LIFO). По этой причине, для отслеживания содержания стека не нужно сложных управляющих структур – достаточно всего лишь указателя на верхушку стека. Добавление данных в стек и их удаление – быстрая и четко определенная операция. Более того, многократное использование одних и тех же областей стекового сегмента приводит к тому, что они, как правило, находятся в кеше процессора, что еще более ускоряет доступ. Каждый тред в рамках процесса работает с собственным стеком.
Возможна ситуация, когда пространство, отведенное под стековый сегмент, не может вместить в себя добавляемые данные. В результате, будет сгенерирован page fault, который в Linux обрабатывается функцией expand_stack(). Она, в свою очередь, вызовет другую функцию — acct_stack_growth(), которая отвечает за проверку возможности увеличить стековый сегмент. Если размер стекового сегмента меньше значения константы RLIMIT_STACK (обычно 8 МБ), то он наращивается, и программа продолжает выполняться как ни в чем не бывало. Это стандартный механизм, посредством которого размер стекового сегмента увеличивается в соответствии с потребностями. Однако, если достигнут максимально разрещённый размер стекового сегмента, то происходит переполнение стека (stack overflow), и программе посылается сигнал Segmentation Fault. Стековый сегмент может увеличиваться при необходимости, но никогда не уменьшается, даже если сама стековая структура, содержащаяся в нем, становиться меньше. Подобно федеральному бюджету, стековый сегмент может только расти.
Динамическое наращивание стека – единственная ситуация, когда обращение к «немэппированной» области памяти, может быть расценено как валидная операция. Любое другое обращение приводит к генерации page fault, за которым следует Segmentation Fault. Некоторые используемые области помечены как read-only, и обращение к ним также приводит к Segmentation Fault.
Под стеком располагается сегмент для memory mapping. Ядро использует этот сегмент для мэппирования (отображания в память) содержимого файлов. Любое приложение может воспользоваться данным функционалом посредством системного вызовома mmap() (ссылка на описание реализации вызова mmap) или CreateFileMapping() / MapViewOfFile() в Windows. Отображение файлов в память – удобный и высокопроизводительный метод файлового ввода / вывода, и он используется, например, для загрузки динамических библиотек. Существует возможность осуществить анонимное отображение в память (anonymous memory mapping), в результате чего получим область, в которую не отображен никакой файл, и которая вместо этого используется для размещения разного рода данных, с которыми работает программа. Если в Linux запросить выделение большого блока памяти с помощью malloc(), то вместо того, чтобы выделить память в куче, стандартная библиотека C задействует механизм анонимного отображения. Слово «большой», в данном случае, означает величину в байтах большую, чем значение константы MMAP_THRESHOLD. По умолчанию, это величина равна 128 кБ, и может контролироваться через вызов mallopt().
Кстати о куче. Она идет следующей в нашем описании адресного пространства процесса. Подобно стеку, куча используется для выделения памяти во время выполнения программы. В отличие от стека, память, выделенная в куче, сохранится после того, как функция, вызвавшая выделение этой памяти, завершится. Большинство языков предоставляют средства управления памятью в куче. Таким образом, ядро и среда выполнения языка совместно осуществляют динамическое выделение дополнительной памяти. В языке C, интерфейсом для работы с кучей является семейство функций malloc(), в то время как в языках с поддержкой garbage collection, вроде C#, основной интерфейс – это оператор new.
Если текущий размер кучи позволяет выделить запрошенный объем памяти, то выделение может быть осуществлено средствами одной лишь среды выполнения, без привлечения ядра. В противном случае, функция malloc() задействует системный вызов brk() для необходимого увеличения кучи (ссылка на описание реализации вызова brk). Управление памятью в куче – нетривиальная задача, для решения которой используются сложные алгоритмы. Данные алгоритмы стремятся достичь высокой скорости и эффективности в условиях непредсказуемых и хаотичных пэттернов выделения памяти в наших программах. Время, затрачиваемое на каждый запрос по выделению памяти в куче, может разительно отличаться. Для решения данной проблемы, системы реального времени используют специализированные аллокаторы памяти. Куча также подвержена фрагментированию, что, к примеру, изображено на рисунке:

Наконец, мы добрались до сегментов, расположенных в нижней части адресного пространства процесса: BSS, сегмент данных (data segment) и сегмент кода (text segment). BSS и data сегмент хранят данные, соответствующий static переменным в исходном коде на C. Разница в том, что в BSS хранятся данные, соответствующие неинициализированным переменным, чьи значения явно не указаны в исходном коде (в действительности, там хранятся объекты, при создании которых в декларации переменной либо явно указано нулевое значение, либо значение изначально не указано, и в линкуемых файлах нет таких же common символов, с ненулевым значением. – прим. перевод.). Для сегмента BSS используется анонимное отображение в память, т.е. никакой файл в этот сегмент не мэппируется. Если в исходном файле на C использовать int cntActiveUsers, то место под соответствующий объект будет выделено в BSS.
В отличии от BSS, data cегмент хранит объекты, которым в исходном коде соответствуют декларации static переменных, инициализированных ненулевым значением. Этот сегмент памяти не является анонимным — в него мэппируется часть образа программы. Таким образом, если мы используем static int cntWorkerBees = 10, то место под соответствующий объект будет выделено в data сегменте, и оно будет хранить значение 10. Хотя в data сегмент отображается файл, это т.н. «приватный мэппинг» (private memory mapping). Это значит, что изменения данных в этом сегменте не повлияют на содержание соответствующего файла. Так и должно быть, иначе присвоения значений глобальным переменным привели бы к изменению содержания файла, хранящегося на диске. В данном случае это совсем не нужно!

Мы можем посмотреть, как используются области памяти процесса, прочитав содержимое файла /proc/pid_of_process/maps. Обратите внимание, что содержимое самого сегмента может состоять из различных областей. Например, каждой мэппируемой в memory mapping сегмент динамической библиотеке отводится своя область, и в ней можно выделить области для BSS и data сегментов библиотеки. В следующем посте поясним, что конкретно подразумевается под словом “область”. Учтите, что иногда люди говорят “data сегмент”, подразумевая под этим data + BSS + heap.
Можно использовать утилиты nm и objdump для просмотра содержимого бинарных исполняемых образов: символов, их адресов, сегментов и т.д. Наконец, то, что описано в этом посте – это так называемая “гибкая” организация памяти процесса (flexible memory layout), которая вот уже несколько лет используется в Linux по умолчанию. Данная схема предполагает, что у нас определено значение константы RLIMIT_STACK. Когда это не так, Linux использует т.н. классическую организации, которая изображена на рисунке:

Ну вот и все. На этом наш разговор об организации памяти процесса завершен. В следующем посте рассмотрим как ядро отслеживает размеры описанных областей памяти. Также коснемся вопроса мэппирования, какое отношение к этому имеет чтение и запись файлов, и что означают цифры, описывающие использование памяти.
Если данные не помещаются в память. Простейшие методы

Самка трубкозуба с детёнышем. Фото: Scotto Bear, CC BY-SA 2.0
Вы пишете программу для обработки данных, она отлично проходит тест на небольшом файле, но падает на реальной нагрузке.
Проблема в нехватке памяти. Если у вас 16 гигабайт ОЗУ, вы не сможете туда загрузить стогигабайтный файл. В какой-то момент у ОС закончится память, она не сможет выделить новую, и программа вылетит.
Что делать?
Ну, можете развернуть кластер Big Data, всего-то:
Нам требуется простое и лёгкое решение: обрабатывать данные на одном компьютере, с минимальной настройкой и максимальным использованием уже подключенных библиотек. Почти всегда это возможно с помощью простейших методов, которые иногда называют «вычислениями вне памяти» (out-of-core computation).
В этой статье обсудим:
Зачем вообще нужна оперативная память?
Прежде чем перейти к обсуждению решений, давайте проясним, почему эта проблема вообще существует. В оперативную память (RAM) можно записывать данные, но и на жёсткий диск тоже, так зачем вообще нужна RAM? Диск дешевле, у него обычно нет проблем с нехваткой места, почему же просто не ограничиться чтением и записью с диска?
Теоретически это может сработать. Но даже современные быстрые SSD работают намного, намного медленнее, чем RAM:
100 наносекунд
Для быстрых вычислений у нас не остаётся выбора: данные приходится записывать в ОЗУ, иначе код замедлится в 150 раз.
Самое простое решение: больше оперативной памяти
Самое простое решение проблемы нехватки оперативной памяти — потратить немного денег. Вы можете купить мощный компьютер, сервер или арендовать виртуальную машину с большим количеством памяти. В ноябре 2019 года быстрый поиск и очень краткое сравнение цен даёт такие варианты:
Потратить немного денег на аппаратное обеспечение, чтобы данные поместились в ОЗУ, — зачастую самое дешёвое решение. В конце концов, наше время дорого. Но иногда этого недостаточно.
Например, если вы выполняете много заданий по обработке данных в течение определённого периода времени, облачные вычисления могут быть естественным решением, но также и дорогостоящим. На одном из наших проектов такие затраты на вычисления израсходовали бы весь прогнозируемый доход от продукта, включая самый важный доход, необходимый для выплаты моей зарплаты.
Если покупка/аренда большого объёма RAM не решает проблему или невозможна, следующий шаг — оптимизировать само приложение, чтобы оно расходовало меньше памяти.
Техника № 1. Сжатие
Сжатие позволяет поместить те же данные в меньший объём памяти. Есть две формы сжатия:
Что нам нужно, так это сжатие представления данных в памяти.
Техника № 2. Разбиение на блоки, загрузка данных по одному блоку за раз
Фрагментация полезна в ситуации, когда данные не обязательно загружать в память одновременно. Вместо этого мы можем загружать их частями, обрабатывая по одному фрагменту за раз (или, как обсудим в следующей статье, несколько частей параллельно).
Предположим, вы хотите найти самое большое слово в книге. Можете загрузить в память сразу все данные:
Но если книга не помещается в память, можно загрузить её постранично:
Это сильно уменьшает потребление памяти, потому что в каждый момент времени загружена только одна страница книги. При этом в итоге будет получен тот же ответ.
Техника № 3. Индексация, когда требуется только подмножество данных
Индексирование полезно, если нужно использовать только подмножество данных и вы собираетесь загружать разные подмножества в разное время.
В принципе, в такой ситуации можно отфильтровать нужную часть и отбросить ненужное. Но фильтрация работает медленно и не оптимально, потому что придётся сначала загрузить в память много лишних данных, прежде чем их отбросить.
Если вам нужна только часть данных, вместо фрагментации лучше использовать индекс — выжимку данных, которая указывает на их реальное местоположение.
Представьте, что вы хотите прочитать только фрагменты книги, где упоминается трубкозуб (симпатичное млекопитающее на фотографии в начале статьи). Если проверять все страницы по очереди, то в память будет загружена по частям вся книга, страница за страницей, в поисках трубкозубов — и это займёт довольно много времени.
Или можете сразу открыть алфавитный индекс в конце книги — и найти слово «трубкозуб». Там указано, что упоминания слова есть на страницах 7, 19 и 120-123. Теперь можно прочитать эти страницы, и только их, что намного быстрее.
Это эффективный метод, потому что индекс намного меньше, чем вся книга, так что намного проще загрузить в память только индекс для поиска соответствующих данных.
Самый простой метод индексирования
Самый простой и распространённый способ индексирования — именование файлов в каталоге:
Если вам нужны данные за март 2019 года, вы просто загружаете файл 2019-Mar.csv — нет необходимости загружать данные за февраль, июль или любой другой месяц.
Дальше: применение этих методов
Проблему нехватки RAM проще всего решить с помощью денег, докупив оперативной памяти. Но если это невозможно или недостаточно, вы так или иначе примените сжатие, фрагментацию или индексирование.
Те же методы используются в различных программных пакетах и инструментах. На них построены даже высокопроизводительные системы Big Data: например, параллельная обработка отдельных фрагментов данных.
В следующих статьях рассмотрим, как применять эти методы в конкретных библиотеках и инструментах, в том числе NumPy и Pandas.
Организация памяти
За последнюю неделю дважды объяснял людям как организована работа с памятью в х86, с целью чтобы не объяснять в третий раз написал эту статью.
И так, чтобы понять организацию памяти от вас потребуется знания некоторых базовых понятий, таких как регистры, стек и тд. Я по ходу попробую объяснить и это на пальцах, но очень кратко потому что это не тема для этой статьи. Итак начнем.
Как известно программист, когда пишет программы работает не с физическим адресом, а только с логическим. И то если он программирует на ассемблере. В том же Си ячейки памяти от программиста уже скрыты указателями, для его же удобства, но если грубо говорить указатель это другое представление логического адреса памяти, а в Java и указателей нет, совсем плохой язык. Однако грамотному программисту не помешают знания о том как организована память хотя бы на общем уровне. Меня вообще очень огорчают программисты, которые не знают как работает машина, обычно это программисты Java и прочие php-парни, с квалификацией ниже плинтуса.
Так ладно, хватит о печальном, переходим к делу.
Рассмотрим адресное пространство программного режима 32 битного процессора (для 64 бит все по аналогии)
Адресное пространство этого режима будет состоять из 2^32 ячеек памяти пронумерованных от 0 и до 2^32-1.
Программист работает с этой памятью, если ему нужно определить переменную, он просто говорит ячейка памяти с адресом таким-то будет содержать такой-то тип данных, при этом сам програмист может и не знать какой номер у этой ячейки он просто напишет что-то вроде:
int data = 10;
компьютер поймет это так: нужно взять какую-то ячейку с номером стопицот и поместить в нее цело число 10. При том про адрес ячейки 18894 вы и не узнаете, он от вас будет скрыт.
Все бы хорошо, но возникает вопрос, а как компьютер ищет эту ячейку памяти, ведь память у нас может быть разная:
3 уровень кэша
2 уровень кэша
1 уровень кэша
основная память
жесткий диск
Это все разные памяти, но компьютер легко находит в какой из них лежит наша переменная int data.
Этот вопрос решается операционной системой совместно с процессором.
Вся дальнейшая статья будет посвящена разбору этого метода.
Архитектура х86 поддерживает стек. 
Стек это непрерывная область оперативной памяти организованная по принципу стопки тарелок, вы не можете брать тарелки из середины стопки, можете только брать верхнюю и класть тарелку вы тоже можете только на верх стопки.
В процессоре для работы со стеком организованны специальные машинные коды, ассемблерные мнемоники которых выглядят так:
push operand
помещает операнд в стек
pop operand
изымает из вершины стека значение и помещает его в свой операнд
Стек в памяти растет сверху вниз, это значит что при добавлении значения в него адрес вершины стека уменьшается, а когда вы извлекаете из него, то адрес вершины стека увеличивается.
Теперь кратко рассмотрим что такое регистры.
Это ячейки памяти в самом процессоре. Это самый быстрый и самый дорогой тип памяти, когда процессор совершает какие-то операции со значением или с памятью, он берет эти значения непосредственно из регистров.
В процессоре есть несколько наборов логик, каждая из которых имеет свои машинные коды и свои наборы регистров.
Basic program registers (Основные программные регистры) Эти регистры используются всеми программами с их помощью выполняется обработка целочисленных данных.
Floating Point Unit registers (FPU) Эти регистры работают с данными представленными в формате с плавающей точкой.
Еще есть MMX и XMM registers эти регистры используются тогда, когда вам надо выполнить одну инструкцию над большим количеством операндов.
Рассмотрим подробнее основные программные регистры. К ним относятся восемь 32 битных регистров общего назначения: EAX, EBX, ECX, EDX, EBP, ESI, EDI, ESP
Для того чтобы поместить в регистр данные, или для того чтобы изъять из регистра в ячейку памяти данные используется команда mov:
mov eax, 10
загружает число 10 в регистр eax.
mov data, ebx
копирует число, содержащееся в регистре ebx в ячейку памяти data.
Регистр ESP содержит адрес вершины стека.
Кроме регистров общего назначения, к основным программным регистрам относят шесть 16битных сегментных регистров: CS, DS, SS, ES, FS, GS, EFLAGS, EIP
EFLAGS показывает биты, так называемые флаги, которые отражают состояние процессора или характеризуют ход выполнения предыдущих команд.
В регистре EIP содержится адрес следующей команды, которая будет выполнятся процессором.
Я не буду расписывать регистры FPU, так как они нам не понадобятся. Итак наше небольшое отступление про регистры и стек закончилось переходим обратно к организации памяти.
Как вы помните целью статьи является рассказ про преобразование логической памяти в физическую, на самом деле есть еще промежуточный этап и полная цепочка выглядит так:
линейный адрес=Базовый адрес сегмента(на картинке это начало сегмента) + смещение
Сегмент кода
Сегмент данных
Сегмент стека
Используемый сегмент стека задается значением регистра SS.
Смещение внутри этого сегмента представлено регистром ESP, который указывает на вершину стека, как вы помните.
Сегменты в памяти могут друг друга перекрывать, мало того базовый адрес всех сегментов может совпадать например в нуле. Такой вырожденный случай называется линейным представлением памяти. В современных системах, память как правило так организована.
Теперь рассмотрим определение базовых адресов сегмента, я писал что они содержаться в регистрах SS, DS, CS, но это не совсем так, в них содержится некий 16 битный селектор, который указывает на некий дескриптор сегментов, в котором уже хранится необходимый адрес. 
Так выглядит селектор, в тринадцати его битах содержится индекс дескриптора в таблице дескрипторов. Не хитро посчитать будет что 2^13 = 8192 это максимальное количество дескрипторов в таблице.
Вообще дескрипторных таблиц бывает два вида GDT и LDT Первая называется глобальная таблица дескрипторов, она в системе всегда только одна, ее начальный адрес, точнее адрес ее нулевого дескриптора хранится в 48 битном системном регистре GDTR. И с момента старта системы не меняется и в свопе не принимает участия.
А вот значения дескрипторов могут меняться. Если в селекторе бит TI равен нулю, тогда процессор просто идет в GDT ищет по индексу нужный дескриптор с помощью которого осуществляет доступ к этому сегменту.
Пока все просто было, но если TI равен 1 тогда это означает что использоваться будет LDT. Таблиц этих много, но использоваться в данный момент будет та селектор которой загружен в системный регистр LDTR, который в отличии от GDTR может меняться.
Индекс селектора указывает на дескриптор, который указывает уже не на базовый адрес сегмента, а на память в котором хранится локальная таблица дескрипторов, точнее ее нулевой элемент. Ну а дальше все так же как и с GDT. Таким образом во время работы локальные таблицы могут создаваться и уничтожаться по мере необходимости. LDT не могут содержать дескрипторы на другие LDT.
Итак мы знаем как процессор добирается до дескриптора, а что содержится в этом дескрипторе посмотрим на картинке: 
Дескрипторы состоит из 8 байт.
Биты с 15-39 и 56-63 содержат линейный базовый адрес описываемым данным дескриптором сегмента. Напомню нашу формулу для нахождения линейного адреса:
линейный адрес = базовый адрес + смещение
[база; база+предел)
(база+предел; вершина]
Кстати интересно почему база и предел так рвано располагаются в дескрипторе. Дело в том что процессоры х86 развивались эволюционно и во времена 286х дескрипторы были по 8 бит всего, при этом старшие 2 байта были зарезервированы, ну а в последующих моделях процессоров с увеличением разрядности дескрипторы тоже выросли, но для сохранения обратной совместимости пришлось оставить структуру как есть.
Значение адреса «вершина» зависит от 54го D бита, если он равен 0, тогда вершина равна 0xFFF(64кб-1), если D бит равен 1, тогда вершина равна 0xFFFFFFFF (4Гб-1)
С 41-43 бит кодируется тип сегмента.
000 — сегмент данных, только считывание
001 — сегмент данных, считывание и запись
010 — сегмент стека, только считывание
011 — сегмент стека, считывание и запись
100 — сегмент кода, только выполнение
101- сегмент кода, считывание и выполнение
110 — подчиненный сегмент кода, только выполнение
111 — подчиненный сегмент кода, только выполнение и считывание
44 S бит если равен 1 тогда дескриптор описывает реальный сегмент оперативной памяти, иначе значение S бита равно 0.
Самым важным битом является 47-й P бит присутствия. Если бит равен 1 значит, что сегмент или локальная таблица дескрипторов загружена в оперативку, если этот бит равен 0, тогда это означает что данного сегмента в оперативке нет, он находится на жестком диске, случается прерывание, особый случай работы процессора запускается обработчик особого случая, который загружает нужный сегмент с жесткого диска в память, если P бит равен 0, тогда все поля дескриптора теряют смысл, и становятся свободными для сохранения в них служебной информации. После завершения работы обработчика, P бит устанавливается в значение 1, и производится повторное обращение к дескриптору, сегмент которого находится уже в памяти.
На этом заканчивается преобразование логического адреса в линейный, и я думаю на этом стоит прерваться. В следующий раз я расскажу вторую часть преобразования из линейного в физический.
А так же думаю стоит немного поговорить о передачи аргументов функции, и о размещении переменных в памяти, чтобы была какая-то связь с реальностью, потому размещение переменных в памяти это уже непосредственно, то с чем вам приходится сталкиваться в работе, а не просто какие-то теоретические измышления для системного программиста. Но без понимания, как устроена память невозможно понять как эти самые переменные хранятся в памяти.
В общем надеюсь было интересно и до новых встреч.



