Шины микропроцессорной системы и циклы обмена
Циклы обмена информацией делятся на два основных типа:
В некоторых микропроцессорных системах существует также цикл «чтение-модификация- запись » или же «ввод-пауза- вывод «. В этих циклах процессор сначала читает информацию из памяти или устройства ввода/вывода, затем как-то преобразует ее и снова записывает по тому же адресу. Например, процессор может прочитать код из ячейки памяти, увеличить его на единицу и снова записать в эту же ячейку памяти. Наличие или отсутствие данного типа цикла связано с особенностями используемого процессора.
Особое место занимают циклы прямого доступа к памяти (если режим ПДП в системе предусмотрен) и циклы запроса и предоставления прерывания (если прерывания в системе есть). Когда в дальнейшем речь пойдет о таких циклах, это будет специально оговорено.
Во время каждого цикла устройства, участвующие в обмене информацией, передают друг другу информационные и управляющие сигналы в строго установленном порядке или, как еще говорят, в соответствии с принятым протоколом обмена информацией.
Длительность цикла обмена может быть постоянной или переменной, но она всегда включает в себя несколько периодов сигнала тактовой частоты системы. То есть даже в идеальном случае частота чтения информации процессором и частота записи информации оказываются в несколько раз меньше тактовой частоты системы.
Чтение кодов команд из памяти системы также производится с помощью циклов чтения. Поэтому в случае одношинной архитектуры на системной магистрали чередуются циклы чтения команд и циклы пересылки (чтения и записи) данных, но протоколы обмена остаются неизменными независимо от того, что передается — данные или команды. В случае двухшинной архитектуры циклы чтения команд и записи или чтения данных разделяются по разным шинам и могут выполняться одновременно.
2.1. Шины микропроцессорной системы
Прежде чем переходить к особенностям циклов обмена, остановимся подробнее на составе и назначении различных шин микропроцессорной системы.
Шина данных — это основная шина, ради которой и создается вся система. Количество ее разрядов (линий связи) определяет скорость и эффективность информационного обмена, а также максимально возможное количество команд.
Шина данных всегда двунаправленная, так как предполагает передачу информации в обоих направлениях. Наиболее часто встречающийся тип выходного каскада для линий этой шины — выход с тремя состояниями.
Шина управления — это вспомогательная шина, управляющие сигналы на которой определяют тип текущего цикла и фиксируют моменты времени, соответствующие разным частям или стадиям цикла. Кроме того, управляющие сигналы обеспечивают согласование работы процессора (или другого хозяина магистрали, задатчика, master) с работой памяти или устройства ввода/вывода (устройства-исполнителя, slave ). Управляющие сигналы также обслуживают запрос и предоставление прерываний, запрос и предоставление прямого доступа.
Сигналы шины управления могут передаваться как в положительной логике (реже), так и в отрицательной логике (чаще). Линии шины управления могут быть как однонаправленными, так и двунаправленными. Типы выходных каскадов могут быть самыми разными: с двумя состояниями (для однонаправленных линий), с тремя состояниями (для двунаправленных линий ), с открытым коллектором (для двунаправленных и мультиплексированных линий).
По используемому типу обмена магистрали микропроцессорных систем также делятся на синхронные и асинхронные.
Шины в микропроцессорной системе
В предыдущей главе я рассказывал про цифровую электронику и общее устройство микроконтроллера (МК). А также, что он состоит из процессора, устройств ввода-вывода (УВВ) и устройства памяти. Но я практически ничего не сказал о том, как они общаются между собой. А это весьма важная тема, в которую я и посвящу тебя в этот раз.
Шины и разряды
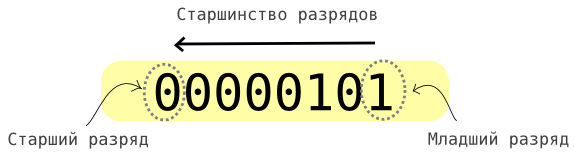
Как ты уже знаешь, вся информация в цифровой технике стараниями инженеров и математиков представляется в виде двоичных чисел, которые записываются с помощью всего двух цифр: «0» и «1». Обычное десятичное число «3» в двоичной записи будет выглядеть как «11», т.е. 310 = 112. Нижние индексы указывают в какой системе счисления записано число, т.е. 10 – десятичная, а 2 – двоичная. Одна цифра в двоичном числе называется разрядом. У разрядов есть старшинство. Самый правый разряд называется младшим, а самый левый – старшим. Старшинство разряда растет справа налево:
Двоичное число, состоящее из 8 разрядов называется 8-ми разрядным, из 16 – шестнадцатиразрядным и т.д. Разрядность двоичного числа имеет самое прямое отношение к взаимодействию между процессором, памятью и устройствами ввода-вывода.
Дело в том, что в твоем МК бегают такие же двоичные числа. Они ходят от памяти к процессору, от процессора назад к памяти или УВВ, а от последних к процессору. Бегают они естественно по проводам (в МК эти шины спрятаны внутри микросхемы). Каждый провод в определённый момент времени может передавать только один разряд со значением «0» или «1». Поэтому, чтобы передать, к примеру, 8-ми разрядное число от процессора к памяти или назад понадобится минимум 8 таких поводов.
Несколько таких проводов, объединенных вместе называются шиной. Шины бывают нескольких видов: шина адреса, шина данных и шина управления. По шине адреса бегают числа, которые обозначают адрес ячейки памяти или устройства ввода-вывода, откуда ты хочешь получить или куда хочешь записать данные. А сами данные будут передаваться уже по шине данных. Это похоже на почтовую посылку. У посылки есть адрес и есть содержание. Так вот в микропроцессорной системе, каковой МК также является, адрес и данные передаются по разным путям, именуемым шинами.
Сколько проводов должно быть в шине?
Это напрямую зависит от конструкции процессора. Процессор может иметь 32-разрядную шину данных и 16-ти разрядное АЛУ. Такие случаи в истории процессоров и МК встречаются многократно. Поэтому разрядность процессора не определяет 100% разрядность шин данных и шин адреса. Всё зависит от конкретной конструкции.
На что влияет разрядность шины адреса
Самым главным, на что она влияет, является количество адресов, которые можно по ней передавать. Например, в 4-разрядной системе это будет всего 2 4 = 16 адресов, в 64-разрядной числов сдресов будет уже 2 64 =18 446 744 073 709 551 616. Таким образом, чем выше разрядность шины адреса, тем к больше объем памяти и больше устройств ввода-вывода, с которыми может работать процессор. Это важно.
На что влияет разрядность шины данных
Её разрядность определяет сколько данных процессор может считать за один раз. Чем выше разрядность, тем больше данных можно считывать за один раз. Её разрядность, как и разрядность шины адреса целиком определяется конструкцией конкретного процессора или МК. Но при этом всегда кратна восьми. Связано это с тем, что практически во всех устройствах памяти минимальной единицей информации является байт, т.е. двоичное число из 8-ми разрядов.
Зачем было нужно вводить ещё одно название: байт? Оно служит для обозначения количества информации. Если количество разрядов говорит просто о длине двоичного числа, то битность говорит о количестве информации, которую это число несет. Считается, что один разряд двоичного числа может передавать 1 бит информации. При этом биты группируются в байты, килобайты, мегабайты, гигабайты, терабайты и т.д.
Кстати, 1 байт = 8 бит, 1 килобайт = 1024 байтам, 1 мегабайт = 1024 килобайтам и т.д. Почему именно 1024? Все это связано с тем, что размер памяти всегда кратен степени двойки: 2 3 = 8, 2 10 =1024. В свою очередь кратность двойке была выбрана благодаря тому, что она упрощает техническую реализацию устройств памяти. Устройство памяти представляет.
Алгоритм работы микроконтроллера
Давай теперь попробуем посмотреть как взаимодействует процессор с памятью и разберёмся зачем нужна шина управления. Любой процессор помимо выполнения арифметических и логических команд умеет делать ещё несколько важных операций: чтение из ячейки памяти, запись в ячейку памяти, чтение из порта ВВ, запись в порт ВВ:
Для того, чтобы указывать какую из этих операций производить используется шина управления. По этой шине от процессора к памяти или портам ввода-вывода передаются сигналы:
| RD (read) | сигнал на чтение |
| WR (write) | сигнал на запись |
| MREQ (memory request) | запрос обращения к памяти |
| IORQ (input/output request) | запрос обращения к портам в/в |
| READY | сигнал готовности |
| RESET | сигнал сброса |
Когда процессору требуется обратиться к памяти он выставляет на шине управления сигнал MREQ, при этом будет выставлен одновременно с ним сигнал RD/WR. Если процессор будет писать в память, то выставляется сигнал WR, если чтение – RD. Тоже самое происходит, если процессор обращается к портам ввода-вывода.
А вот сигнал READY нужен для того, чтобы сообщить процессору, что чтение/запись завершены. Всё довольно просто. Если тебя одолевают вопросы почему несмотря на то, что и память и порты ввода-вывода, через которые подключены внешние устройства, не конфликтуют, то разгадка будет довольно простой. В каждый момент времени процессор обращается только к одному конкретному устройству: либо памяти, либо через порты к портам ввода-вывода. И шина управления обеспечивает правильное разделение доступа.
Все описанное – упрощенная модель микропроцессорной системы, каковой является и персональный компьютер, и микроконтроллер.
Теперь вырисовывается уточнение к алгоритму работу микроконтроллера, который я описывал в прошлой главе. Когда ты подаёшь питание на МК, то он выставляет сигнал на шине управления MREQ, RD, а на шине адреса адрес, по которому в ячейке памяти программ должна находиться первая команда его программы (чаще всего это нулевой адрес памяти программ). Затем МК её выполнит и в зависимости от этой и последующих команд на шине управления, адреса и данных будут появляться соответствующие сигналы и данные.
Подведу итоги:
Шины микропроцессорной системы и циклы обмена
Циклы обмена информацией делятся на два основных типа:
В некоторых микропроцессорных системах существует также цикл «чтение-модификация- запись » или же «ввод-пауза- вывод «. В этих циклах процессор сначала читает информацию из памяти или устройства ввода/вывода, затем как-то преобразует ее и снова записывает по тому же адресу. Например, процессор может прочитать код из ячейки памяти, увеличить его на единицу и снова записать в эту же ячейку памяти. Наличие или отсутствие данного типа цикла связано с особенностями используемого процессора.
Особое место занимают циклы прямого доступа к памяти (если режим ПДП в системе предусмотрен) и циклы запроса и предоставления прерывания (если прерывания в системе есть). Когда в дальнейшем речь пойдет о таких циклах, это будет специально оговорено.
Во время каждого цикла устройства, участвующие в обмене информацией, передают друг другу информационные и управляющие сигналы в строго установленном порядке или, как еще говорят, в соответствии с принятым протоколом обмена информацией.
Длительность цикла обмена может быть постоянной или переменной, но она всегда включает в себя несколько периодов сигнала тактовой частоты системы. То есть даже в идеальном случае частота чтения информации процессором и частота записи информации оказываются в несколько раз меньше тактовой частоты системы.
Чтение кодов команд из памяти системы также производится с помощью циклов чтения. Поэтому в случае одношинной архитектуры на системной магистрали чередуются циклы чтения команд и циклы пересылки (чтения и записи) данных, но протоколы обмена остаются неизменными независимо от того, что передается — данные или команды. В случае двухшинной архитектуры циклы чтения команд и записи или чтения данных разделяются по разным шинам и могут выполняться одновременно.
2.1. Шины микропроцессорной системы
Прежде чем переходить к особенностям циклов обмена, остановимся подробнее на составе и назначении различных шин микропроцессорной системы.
Шина данных — это основная шина, ради которой и создается вся система. Количество ее разрядов (линий связи) определяет скорость и эффективность информационного обмена, а также максимально возможное количество команд.
Шина данных всегда двунаправленная, так как предполагает передачу информации в обоих направлениях. Наиболее часто встречающийся тип выходного каскада для линий этой шины — выход с тремя состояниями.
Шина управления — это вспомогательная шина, управляющие сигналы на которой определяют тип текущего цикла и фиксируют моменты времени, соответствующие разным частям или стадиям цикла. Кроме того, управляющие сигналы обеспечивают согласование работы процессора (или другого хозяина магистрали, задатчика, master) с работой памяти или устройства ввода/вывода (устройства-исполнителя, slave ). Управляющие сигналы также обслуживают запрос и предоставление прерываний, запрос и предоставление прямого доступа.
Сигналы шины управления могут передаваться как в положительной логике (реже), так и в отрицательной логике (чаще). Линии шины управления могут быть как однонаправленными, так и двунаправленными. Типы выходных каскадов могут быть самыми разными: с двумя состояниями (для однонаправленных линий), с тремя состояниями (для двунаправленных линий ), с открытым коллектором (для двунаправленных и мультиплексированных линий).
По используемому типу обмена магистрали микропроцессорных систем также делятся на синхронные и асинхронные.
Общие принципы построения микропроцессорных систем.
Дата добавления: 2013-12-23 ; просмотров: 4809 ; Нарушение авторских прав
Лекция 1.
Разрядность какой шины прямо определяет быстродействие
ЛЕКЦИЯ №1
1. В чем главное преимущество микропроцессорной системы?
2. Какой режим обмена предполагает отключение процессора?
· процессор никогда не отключается
· обмен по прямому доступу к памяти
· обмен по прерываниям
3. Микропроцессорная система какого типа не обеспечивает управление внешними устройствами?
· все типы обеспечивают управление внешними устройствами
микропроцессорной системы?
5. Какой режим обмена обеспечивает наибольшую скорость передачи информации?
· обмен по прямому доступу к памяти
· обмен по прерываниям
· все режимы одинаковы по быстродействию
6. Какая архитектура обеспечивает более высокое быстродействие?
· быстродействие не зависит от архитектуры
7. Структура какой шины влияет на разнообразие режимов обмена?
8. Какой режим обмена используется чаще всего?
· обмен по прерываниям
· все режимы используются одинаково часто
· обмен по прямому доступу к памяти
9. Микропроцессорная система какого типа разрабатывается
чаще всего?
· разработка не требуется, используются готовые системы
1.1 Понятия об электронной системе обработки информации. Цифровая система на “жёсткой” и “гибкой” логике.
1.2 Микропроцессор. Микропроцессорная система.
Принципы построения МП – систем.
1.3 Шинная структура связей.
1.4 Режимы работы МП-систем.
1.5 Архитектура МП-систем.
1.7 Контрольные вопросы.
Ключевые слова:микропроцессор, микропроцессорная система, шина, архитектура, память, устройство ввода-вывода.
1.1 Понятия об электронной системе обработки информации. Цифровая система на “жёсткой” и “гибкой” логике.
Микропроцессорная техника сейчас все активнее входит в нашу жизнь, постепенно замещая и вытесняя традиционную цифровую технику на «жесткой логике». Универсальность, гибкость, простота проектирования аппаратуры, практически неограниченные возможности по усложнению алгоритмов обработки информации — все это обещает микропроцессорной технике большое будущее. На долю традиционной цифровой техники остаются только узлы и устройства, требующие максимального быстродействия, а также устройства с простейшими алгоритмами обработки информации. Обычная цифровая техника сегодня применяется для увеличения возможностей микропроцессорных систем, для их сопряжения с внешними устройствами, для увеличения их возможностей, то есть играет вспомогательную роль. Таким образом, традиционную цифровую технику в самом недалеком будущем, по-видимому, ждет участь аналоговой техники, область применения которой в своё время сильно сузилась с появлением цифровой.
Ведём несколько основных определений.
• Электронная система— в данном случае это любой электронный узел,
блок, прибор или комплекс, производящий обработку информации.
• Аналоговая система –это частный случай электронной системы, производящей обработку информации представленной в аналоговом виде (ток, напряжение и т.д.).
• Цифровая система –это частный случай электронной системы, производящей обработку информации представленной в цифровом виде.
Характерная особенность традиционной цифровой системы состоит в том, что алгоритмы обработки и хранения информации в ней жестко связаны со схемотехникой системы. То есть изменение этих алгоритмов возможно только путем изменения структуры системы, замены электронных узлов, входящих в систему, и/или связей между ними. Например, если нам нужна дополнительная операция суммирования, то необходимо добавить в структуру системы лишний сумматор. Или если нужна дополнительная функция хранения кода в течение одного такта, то мы должны добавить в структуру еще один регистр. Естественно, это практически невозможно сделать в процессе эксплуатации, обязательно нужен новый производственный цикл проектирования, изготовления, отладки всей системы. Именно поэтому традиционная цифровая система часто называется системой на «жесткой логике».
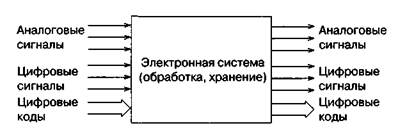
Рис. 1.1.Электронная система.
Любая система на «жесткой логике» обязательно представляет собой специализированную систему, настроенную исключительно на одну задачу или (реже) на несколько близких, заранее известных задач. Это имеет свои бесспорные преимущества.
Во-первых, специализированная система (в отличие от универсальной) никогда не имеет аппаратурной избыточности, то есть каждый ее элемент обязательно работает в полную силу (конечно, если эта система грамотно спроектирована).
Но в то же время большим недостатком цифровой системы на «жесткой логике» является то, что для каждой новой задачи ее надо проектировать и изготавливать заново.
Это процесс длительный, дорогостоящий, требующий высокой квалификации исполнителей. А если решаемая задача вдруг изменяется, то вся аппаратура должна быть полностью заменена. В нашем быстро меняющемся мире это довольно расточительно.
Путь преодоления этого недостатка довольно очевиден: надо построить такую систему, которая могла бы легко адаптироваться под любую задачу, перестраиваться с одного алгоритма работы на другой без изменения аппаратуры.
И задавать тот или иной алгоритм мы тогда могли бы путем ввода в систему некой дополнительной управляющей информации, программыработы системы (рис. 1.2). Тогда система станет универсальной, или программируемой, не жесткой, а гибкой. Именно это и обеспечивает микропроцессорная система.
Микропроцессорной системойназываютвычислительную, контрольно-измерительную или управляющую систему, в которой основным устройством обработки информации есть микропроцессор.
.
Шины микропроцессорной системы и циклы обмена
Циклы обмена информацией делятся на два основных типа:
В некоторых микропроцессорных системах существует также цикл «чтение-модификация- запись » или же «ввод-пауза- вывод «. В этих циклах процессор сначала читает информацию из памяти или устройства ввода/вывода, затем как-то преобразует ее и снова записывает по тому же адресу. Например, процессор может прочитать код из ячейки памяти, увеличить его на единицу и снова записать в эту же ячейку памяти. Наличие или отсутствие данного типа цикла связано с особенностями используемого процессора.
Особое место занимают циклы прямого доступа к памяти (если режим ПДП в системе предусмотрен) и циклы запроса и предоставления прерывания (если прерывания в системе есть). Когда в дальнейшем речь пойдет о таких циклах, это будет специально оговорено.
Во время каждого цикла устройства, участвующие в обмене информацией, передают друг другу информационные и управляющие сигналы в строго установленном порядке или, как еще говорят, в соответствии с принятым протоколом обмена информацией.
Длительность цикла обмена может быть постоянной или переменной, но она всегда включает в себя несколько периодов сигнала тактовой частоты системы. То есть даже в идеальном случае частота чтения информации процессором и частота записи информации оказываются в несколько раз меньше тактовой частоты системы.
Чтение кодов команд из памяти системы также производится с помощью циклов чтения. Поэтому в случае одношинной архитектуры на системной магистрали чередуются циклы чтения команд и циклы пересылки (чтения и записи) данных, но протоколы обмена остаются неизменными независимо от того, что передается — данные или команды. В случае двухшинной архитектуры циклы чтения команд и записи или чтения данных разделяются по разным шинам и могут выполняться одновременно.
2.1. Шины микропроцессорной системы
Прежде чем переходить к особенностям циклов обмена, остановимся подробнее на составе и назначении различных шин микропроцессорной системы.
Шина данных — это основная шина, ради которой и создается вся система. Количество ее разрядов (линий связи) определяет скорость и эффективность информационного обмена, а также максимально возможное количество команд.
Шина данных всегда двунаправленная, так как предполагает передачу информации в обоих направлениях. Наиболее часто встречающийся тип выходного каскада для линий этой шины — выход с тремя состояниями.
Шина управления — это вспомогательная шина, управляющие сигналы на которой определяют тип текущего цикла и фиксируют моменты времени, соответствующие разным частям или стадиям цикла. Кроме того, управляющие сигналы обеспечивают согласование работы процессора (или другого хозяина магистрали, задатчика, master) с работой памяти или устройства ввода/вывода (устройства-исполнителя, slave ). Управляющие сигналы также обслуживают запрос и предоставление прерываний, запрос и предоставление прямого доступа.
Сигналы шины управления могут передаваться как в положительной логике (реже), так и в отрицательной логике (чаще). Линии шины управления могут быть как однонаправленными, так и двунаправленными. Типы выходных каскадов могут быть самыми разными: с двумя состояниями (для однонаправленных линий), с тремя состояниями (для двунаправленных линий ), с открытым коллектором (для двунаправленных и мультиплексированных линий).
По используемому типу обмена магистрали микропроцессорных систем также делятся на синхронные и асинхронные.



