OBD2 reader — диагностика автомобиля
Выбор подключения
Изначально необходимо пояснить что для подключения к авто будет использоваться ELM327 адаптер. ELM327 – это микросхема, которая позволяет преобразовать протоколы, используемые в диагностических шинах автомобилей в протокол RS232, которым мы и будем передавать данные. За счет того что передача данных по протоколу RS232 происходит последовательно возникает первая проблема – скорости передачи данных, которую мы постараемся обойти в одном из следующих пунктов.
Существует несколько вариаций адаптера ELM327, которые классифицируются по способу передачи данных – Bluetooth, WIFI, USB. Исходя из того что целью разработки является мобильное устройство под операционной системой Android можно подобрать две наиболее подходящие версии ELM327, такие как Bluetooth и WIFI. Так как способ получения и обработки данных один, а отличаются они всего лишь вариантами подключения к адаптеру, то можно выбрать всего один, организовать при помощи него диалог, а после добавить остальные варианты подключения.
ELM327 1.5 vs ELM327 2.1

Одной из первых проблем, с которыми можно столкнуться стала проблема выбора непосредственно адаптера, в нашем случае Bluetooth. Оказывается если вам необходимо поддерживать все (по крайней мере большинство) автомобилей необходимо выбирать версию v1.5 вместо v2.1, что на самом то деле необходимо несколько раз уточнить при покупке адаптера, потому как продавцы пытаются выдать версию адаптера не за ту, которая есть на самом деле, т.к. они особо ничем не отличаются. На деле же в версии v2.1 отсутствует поддержка протоколов J1850 PWM и J1850 VPW, что говорит о том, что у вас не получится подключиться к автомобилям, которые используют эти протоколы.
Подключение
Подключение к адаптеру происходит в несколько этапов:
AT Z [reset all]
Сброс настроек адаптера до заводского состояния.
AT L1-0
Включить/Отключить символы перевода строки.
AT E1-0
Echo on – off
AT H1-0
Headers on – off
AT AT0-1-2
Adaptive Timing Off — adaptive Timing Auto1 — adaptive Timing Auto2
AT ST FF
Установить таймаут на максимум.
AT D [set all to Default]
Сброс настроек в исходное, настроенное пользователем состояние.
AT DP [Describe the current Protocol]
Сканер способен самостоятельно определять протокол автомобиля, к которому он подключен.
AT IB10 [set the ISO Baud rate to 10400]
Команда устанавливает скорость обмена данных для ISO 9141-2 и
ISO 14230-4 10400
AT IB96 [ set the ISO Baud rate to 9600]
Команда устанавливает скорость обмена данных для ISO 9141-2 и
ISO 14230-4 9600 для протоколов 3,4,5.
AT SP h [ Set Protocol h]
Команда выбора протокола h, где h:
0 – Automatic;
1 — SAE J1850 PWM (41.6 Kbaud);
2 — SAE J1850 VPW (10.4 Kbaud);
3 — ISO 9141-2 (5 baud init, 10.4 Kbaud);
4 — ISO 14230-4 KWP (5 baud init, 10.4 Kbaud);
5 — ISO 14230-4 KWP (fast init, 10.4 Kbaud);
6 — ISO 15765-4 CAN (11 bit ID, 500 Kbaud);
7 — ISO 15765-4 CAN (29 bit ID, 500 Kbaud);
8 — ISO 15765-4 CAN (11 bit ID, 250 Kbaud);
9 — ISO 15765-4 CAN (29 bit ID, 250 Kbaud);
AT SP Ah [Set Protocol h with Auto]
Команда устанавливает по умолчанию протокол h, если подключение по протоколу h не удалось, тогда адаптер начинает автоматический подбор протокола.
Исходя из описанных выше команд, формируем инициализационную строку.
Желательно давать возможность пользователю сменять инициализационные команды, потому как для того чтобы подобрать «ключ» к некоторым авто необходимо выбрать более подходящие настройки адаптера. В нашем же случае используются настройки, которые походят для большинства стандартных протоколов.
Так же желательно обратить внимание на команду APSP0, таким образом мы устанавливаем по умолчанию автоматический подбор протокола, это может занять некоторое время.
Соответственно если пользователь знает какой у его авто протокол, то используя возможность смены протокола подключения он может поменять 0 на номер его протокола.
Считывание диагностических данных
Для считывания диагностических данных используются специальные команды PID’s.
PID (Parameter id’s — Бортовые диагностические идентификаторы параметров) – коды, которые используются для запроса показателей определенных датчиков автомобиля.
Основные пиды можно найти в Википедии, там полный набор основных команд, которые должны поддерживать все автомобили. Так же есть наборы команд для определенных марок и типов автомобилей, эти наборы предоставляются за отдельную плату. В нашем случае приложение заточено на базовую диагностику автомобилей соответственно мы используем базовый набор команд.
Также есть возможность получать текущие данные от автомобиля при этом команда получения данных от авто будет иметь вначале 01, указывая на то что мы хотим получить real data. Если же мы хотим получить сохраненные данные автомобиля, то вначале команды необходимо указать 02. Например, команда для получения текущей скорости автомобиля – 010D, а для получения сохраненной скорости – 020D.
Если внимательно посмотреть на то количество команд, которое предоставляется открытыми ресурсами, то можно как раз и заметить ту проблему, о которой я писал в самом начале, а именно проблема скорости ответа адаптера. Так как отправка и получение команд идет последовательно, то для того чтобы получить показания датчика на текущий момент времени необходимо дождаться ответа на все предыдущие команды. Соответственно если запрашивать на получение все команды, то большая вероятность того что обновление реальных данных будет происходить очень медленно. Но и эту проблему можно решить, если воспользоваться командами, которые отобразят только те команды, что существуют в автомобиле. Например:
0100 – PIDs supported [01 — 20]
0120 – PIDs supported [21 — 40]
0140 – PIDs supported [41 — 60]
0160 – PIDs supported [61 — 80]
0180 – PIDs supported [81 – A0]
01A0 – PIDs supported [A1 — C0]
Я продемонстрирую как определить какие датчики присутствуют в автомобиле при помощи одного из пидов. Например:
Используя следующую табличку можем определить какие пиды поддерживаются нашим автомобилем, начиная от 01 до 20:
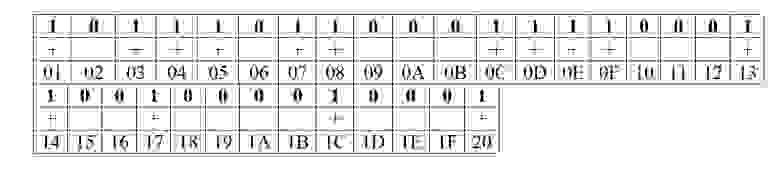
Исходя из получившихся данных можем определить, что наш автомобиль поддерживает следующие пиды:
Теперь вместо отправки всех 32 команд и ожидания ответа на них, несмотря на то, что некоторые могут отсутствовать, мы будем использовать всего 15 команд. Но и это не предел так называемой оптимизации. Для того чтобы данные обновлялись еще быстрее советую запрашивать только данные о тех датчиках, которые отображаются на экране. Хотя это ограничивает некоторый функционал приложения. Например, запись истории.
Считывание и расшифровка ошибок автомобиля
Ошибки автомобиля тоже могут быть различными и для них тоже существуют отдельные команды. Например:
А теперь пояснение.
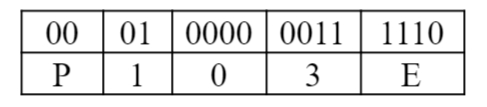
Исходя из полученного ответа мы можем получить код ошибки, для этого декодируем полученное сообщение используя следующие таблички.
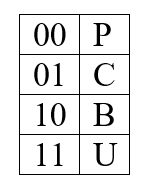
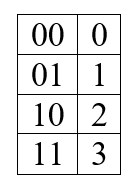
3, 4, 5 символы формируются по этой таблице:
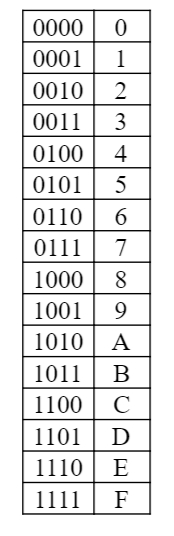
Исходя из этого можем попробовать разобрать следующий ответ 0001000000111110
Эпилог
На данном этапе мы разобрались в том, каким образом организовать диалог с адаптером, посылать ему команды, получать и расшифровывать его ответы. Это большая часть работы, если считать то, сколько времени уходит на изучение материала, но в то же время довольно таки интересная. За пределами этой статьи осталось множество проблем связанных с визуальным интерфейсом, а также множество дополнительных функций, таких как добавление новых пидов из файла, стандартный и расширенный способ подключения к адаптеру и построения графиков.

K-LINE адаптеры и шина

Статьи 18 комментариев 18 декабря 2019 Просмотров: 23683 Рейтинг:
Время прочтения
Сложность материала:
K-Line — одноканальная, но двунаправленная шина, которая применяется в оборудовании для автодиагностики, для связи с электронными блоками управления (ЭБУ). Используется в системах с инжекторным впрыском топлива двигателей внутреннего сгорания (ДВС). Работа K-Line обеспечена протоколами ISO 9141-2 и ISO 14230, которые входят в известный стандарт OBD II. До появления шины CAN, как раз K-линия соединяла электронные узлы автомобиля в единую цепь.


Стандарты ISO 9141 и ISO 14230 схожи по аппаратной реализации линий передачи данных (14230 является развитием 9141). Различаются они требованиями к электрическим параметрам линии, а также протоколами верхних уровней.
Скорость обмена данными небольшая – до 10 КБ за секунду. В протоколе ISO 9141-2 пакеты передаются по 7 пину (K-линия) сервисной колодки. L-Line используется только для соединения ЭБУ со сканером.

Используя простой K-Line адаптер, можно настроить множество узлов в автомобилях группы VAG. Для этого необходимо знать основные каналы адаптации.
В этом материале максимально подробно рассказано о шине K-Line, а так же об адаптерах для соединения с ЭБУ автомобиля по этой линии.
1. Виды K-LINE адаптеров и их применение
USB K-Line – это простой блок, коммутирующийся через обычный ноутбук. При помощи сервисного ПО владельцу доступны базовые настройки, включая чтение кодов ошибок.
Применение диагностических адаптеров ELM327 на практике и список поддерживаемых автомобилей

Совместимость 87 комментариев 05 мая 2018 Просмотров: 100273 Рейтинг:
Время прочтения
Сложность материала:
ELM327 — микросхема, преобразующая ряд протоколов, используемых в диагностических шинах автомобилей, в протокол RS-232, разработанная компанией Elm Electronics.
Изначальная оригинальная реализация ELM327 выполнена на микроконтроллере PIC18F2480 фирмы Microchip Technology. Бывают проводные и беспроводные модели.
❗❗❗ Адаптер ELM327 совместим исключительно с автомобилями, которые оборудованы специальным диагностическим разъемом OBD2 16 пин. Такие авто впервые стали выпускаться в США в 1996 году, в остальных странах оснащение диагностическим разъемом произошло намного позднее. Автомобильные концерны на территории Японии комплексно оборудовали все типы производимых машин начиная с 2000 г. В европейских государствах машины, работающие на бензине были оборудованы в 2001 г., дизельные с 2004 г. Китайские авто оснастили в 2008, 2009 годах соответственно.
Отечественные автозаводы начали укомплектовывать 16 контактными разъемами модели выпускаемые с 2010 года. До 2010 на Российских моделях устанавливали 12 pin GM (VAG) разъем, для подключения к таким интерфейсам потребуются переходники.
OBD-II для диагностики автомобилей: основная информация
Введение
Режимы диагностики
Режим ручного ввода команды запроса диагностической информации.
Надо учитывать, что как далеко не на каждом автомобиле блок управления поддерживает все перечисленные функции, так и не каждый диагностический сканер для OBD-II может дать диагносту возможность использовать все перечисленные режимы.
Используемые протоколы и применяемость OBD-II-диагностики на автомобилях разных марок
2. Посмотреть в информационной базе данных, типа Mitchell-on-Demand и т.п. Однако, это также не абсолютный способ, так как база может содержать неточности, включать информацию по автомобилям, выпущенным для другого рынка и т.п. Естественно, использование специализированных дилерских баз по отдельной марке повышает степень достоверности информации;
3. Использовать сканер, позволяющий определить, какой из OBD-II протоколов используется на машине. Из предлагаемых нами приборов автоматически это сможет сделать Х-431 и OZEN MOByDic 2600. С помощью комплекта ScanTool Вы сможете это сделать вручную путем последовательной смены используемых адаптеров и проверки наличия связи с ЭБУ автомобиля. Если никаких предположений по используемому протоколу нет, то начинать перебор стоит с протокола ISO как наиболее распространенного (либо с протокола, указанного для диагностируемой машины в таблице);
4. Осмотреть диагностический разъем и определить наличие выводов в нем (как правило, присутствует только часть задействованных выводов, а каждый протокол использует свои выводы разъема).
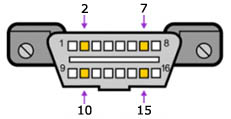
Назначение выводов («распиновка») 16-ти контактного диагностического разъема OBD-II (стандарт J1962):
По наличию выводов можно ориентировочно судить об используемом протоколе при помощи следующей таблицы:
| Стандарт | Pin 2 | Pin 7 | Pin 10 | Pin 15 |
| ISO-9141 и ISO-14230 | Должен присутствовать | Должен присутствовать (если автомобиль использует L-линию диагностики) | ||
| PWM (J1850) | Должен присутствовать | Должен присутствовать | ||
| VPW (J1850) | Должен присутствовать |
Протоколы PWM, VPW идентифицируются отсутствием контакта 7 (K-Line) диагностического разъема.
5. Подавляющее большинство автомобилей используют протоколы ISO. Некоторые исключения:
— большая часть легковых автомобилей и легких грузовиков концерна GM используют протокол SAE J1850 VPW;
— большая часть автомобилей Ford использует протокол J1850 PWM.
— прочие.
Дополнительные сведения об OBD-II диагностике.
Диагностический разъёm OBD-II
Контакты диагностического разъема для используемых протоколов.
Протокол ISO 9141-2 идентифицируется наличием контакта 7 и отсутствием 2 и/или 10 контактов на диагностическом разъеме. Если отсутствует контакт 7, в системе используется протокол SAE J1850 VPW (Variable Pulse Width Modulation) или SAE J1850 PWM (Pulse Width Modulation). Все три протокола обмена данных работают через стандартный кабель OBD-II J1962 connector.
OBD-II TERMINOLOGY This document covers the new standardized OBD-II terms and acronyms.
Протоколы стандарта OBD2
В рамках диагностического стандарта OBDII существует 5 основных протоколов обмена данными между электронным блоком управления (ЭБУ) и диагностическим сканером. Физически подключение автосканера к ЭБУ производится через разъем DLC (Diagnostic Link Connector), который соответствует стандарту SAE J1962 и имеет 16 контактов (2×8). Ниже представлена схема расположения контактов в разъеме DLC (рисунок 1), а также назначение каждого из них.
Рисунок 1 – Расположение контактов в разъеме DLC (Diagnostic Link Connector)
1. OEM (протокол производителя).
Коммутация +12в. при включении зажигания.
9. Линия CAN-Low, низкоскоростной шины CAN Lowspeed.
2. Шина + (Bus positive Line). SAE-J1850 PWM, SAE-1850 VPW.
10. Шина — (Bus negative Line). SAE-J1850 PWM, SAE −1850 VPW.
4. Заземление кузова.
5. Сигнальное заземление.
6. Линия CAN-High высокоскоростной шины CAN Highspeed (ISO 15765-4, SAE-J2284).
14. Линия CAN-Low высокоскоростной шины CAN Highspeed (ISO 15765-4, SAE-J2284).
7. K-Line (ISO 9141-2 и ISO 14230).
15. L-Line (ISO 9141-2 и ISO 14230).
16. Питание +12в от АКБ.
Назначение неопределенных контактов выбирается на усмотрение производителя автомобиля. Разъем должен быть расположен не далее, чем в 2 футах (0.61 метра) от рулевого колеса.
Также бывают обратные ситуации, когда на автомобиле установлен нестандартный разъем, но при этом автомобиль поддерживает один из диагностических протоколов OBD-II.
Далее подробно рассмотрим формат и физический уровень каждого протокола связи в рамках стандарта OBDII.
SAE J1850 PWM
Существует два типа протокола J1850. PWM является высокоскоростным и обеспечивает передачу информации со скоростью 41,6 Кбайт/с. Он применяется в автомобилях марок Ford, Jaguar и Mazda. В протоколе PWM сигналы передаются по двум проводам, подсоединенным к 2 и 10 контакту диагностического разъема.
Формат сигнала протокола J1850 включает:

Если рассматривать формат протокола более подробно по битам, то он примет следующий вид:
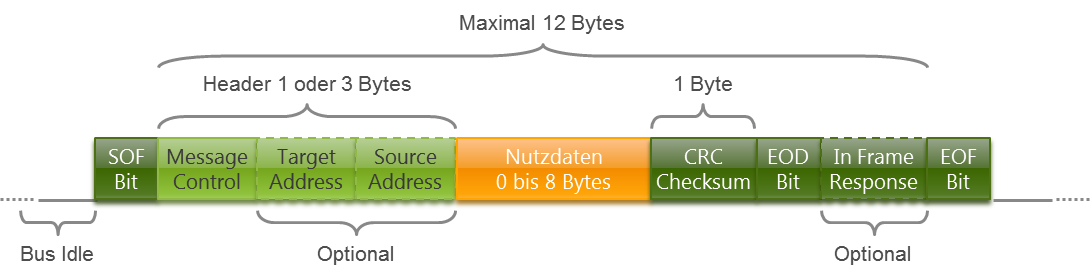
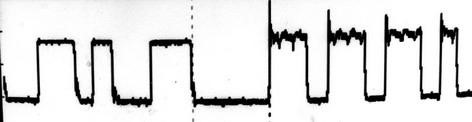
Реальный пример сигнала SAE J1850 выгладит следующим образом:
SAE J1850 VPW
ISO 9141-2
Данный протокол разработан компанией ISO. Он не такой сложный, как протоколы J1850 и не требует в использовании специальных коммуникационных микропроцессоров, но, с другой стороны, обеспечивает довольно медленную передачу данных со скоростью 10 Кбайт/c. Протоколы ISO 9141 и ISO 14230 схожи по физической реализации обмена информацией, но различаются ее использованием. Поэтому сканер ISO 9141, обычно может работать и с ISO 14230, но не наоборот.
В протоколе ISO 9141-2 сигналы передаются по 7 контакту (К-линия) и опционально по 15 контакту (L-линия). К-линия является двунаправленной (т.е. передает данные в обе стороны), L-линия однонаправленная и используется лишь для соединения ЭБУ и сканера, после чего линия L переходит в состояние логической единицы.
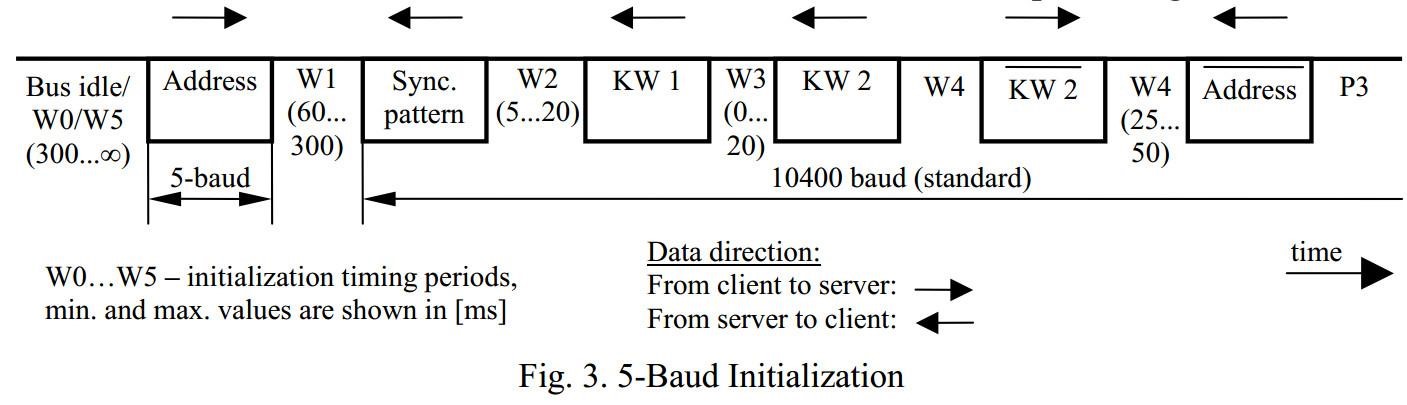
Физический уровень передачи информации в протоколах ISO 9141 и ISO 14230 заключается в одновременной передачи ЭБУ специального 8-битного кода по К- и L-линиям со скоростью 5Б/сек. Если код правильный, то ЭБУ посылает сканеру 8-битный код со скоростью последующего соединения. Затем передается еще два кода с информацией о последующем соединении и расположении К- и L-линий. Сканер возвращает отражение этих кодов в ЭБУ. На этом процесс распознавания окончен.
В общем виде процесс инициализации сигнала в протоколах ISO 9141 и ISO 14230 выглядит следующим образом:
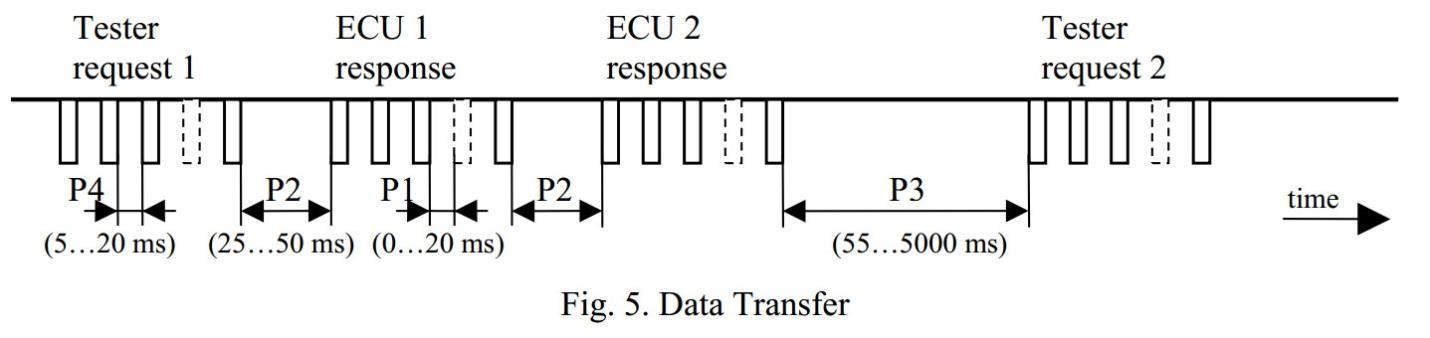
Передача данных в протоколе осуществляется по следующей схеме:
ISO 14230-4 (др. название Keyword Protocol 2000)
На физическом уровне данный протокол идентичен ISO 9141, но является еще более медленным (скорость передачи данных от 1,2 до 10 Кбайт/c в быстрой версии).
ISO 15765 CAN
CAN-протокол был разработан компанией Bosch для автомобильного и промышленного применения. В рамках стандарта OBD2 протокол использует линии CAN High и CAN Low, т.е. 2 контакта для обмена сигналом: 6 и 14. Является самым скоростным и совершенным. Сейчас данный протокол используется на большинстве современных автомобилях. Стандарт CAN не регламентирует определенной скорости работы для каждой шины в автомобиле. С помощью отдельных и встроенных микроконтроллеров есть возможность менять ее от 20 Кбит/c до 1 Мбит/с. Более подробно CAN рассмотрен в статье CAN-шина и CAN-интерфейс.
Команда EmbeddedSystem занимается разработкой широкого спектра электронной продукции, включая разработку и производство электроники для автомобилей, автобусов и грузовиков. Возможна разработка и поставка электроники, как на коммерческих, так и на партнерских условиях. Звоните! Примеры проектов.



