RCDetails Blog
О коптерах и не только
Как поменять настройки видеопередатчика в Betaflight OSD или прямо с Тараниса

Управление видеопередатчиком — это новый функционал в мире мини коптеров, позволяет менять номер канала и выходную мощность при помощи Betaflight OSD или прямо с пульта Taranis, используя LUA скрипты. Этот функционал часто называют «VTX Control» или «VTX Telemetry».
Больше не нужно путаться с дип переключателями и кнопками!
Все становится намного проще благодаря тому, что параметры видеопередатчика можно менять удаленно, используя аппаратуру управления. Возможно это звучит не очень круто, но после того, как я попробовал эту штуку пару раз, то был ошарашен тем, как это удобно, и теперь я всем настоятельно рекомендую попробовать!
Управление видеопередатчиком полезно, например, во время гонки и если вы упали, тогда можно включить режим PitMode на видеопередатчике не ломясь к квадрику. Это минимизирует помехи другим пилотам, и теоретически защищает передатчик от перегрева из-за недостаточного охлаждения.
Ограничение
Единственная проблема с удаленным управлением видеопередатчиком через OSD — это необходимость выбора правильного канала в самом начале, иначе придется пройтись по всем каналам на приемнике, чтобы найти текущий.
Поэтому управление прямо с Тараниса будет удобнее (при помощи LUA скрипта), и вы сможете менять настройки вне зависимости от того, какой канал сейчас активен.
Видеопередатчики, которые поддерживают удаленное управление
Есть несколько разных протоколов управления видеопередатчиками, они позволяют менять настройки как с аппаратуры управления, так и через Betaflight OSD.
Однако большинство производителей видеопередатчиков используют либо «Tramp Telemetry«, либо «SmartAudio«. Ниже список довольно новых видеопередатчиков, поддерживающих эти протоколы:
Все эти протоколы нужны для одного и того же, и настройки в Betaflight Configurator’е будут идентичными, за исключением одного параметра, где вы выбираете необходимый протокол.
Подключение
Нужно подключить всего один проводок!
Подключение разных видеопередатчиков одинаковое, различия только в названиях контактов. Для видеопередатчиков с протоколом Tramp Telemetry, контакт обычно называется «Telemetry«, в случае с протоколом SmartAudio — название будет «Audio» или «SmartAudio«. Иногда встречается название FC UART…
Просто подключите «Telemetry» или «SmartAudio» к контакту TX свободного последовательного порта.
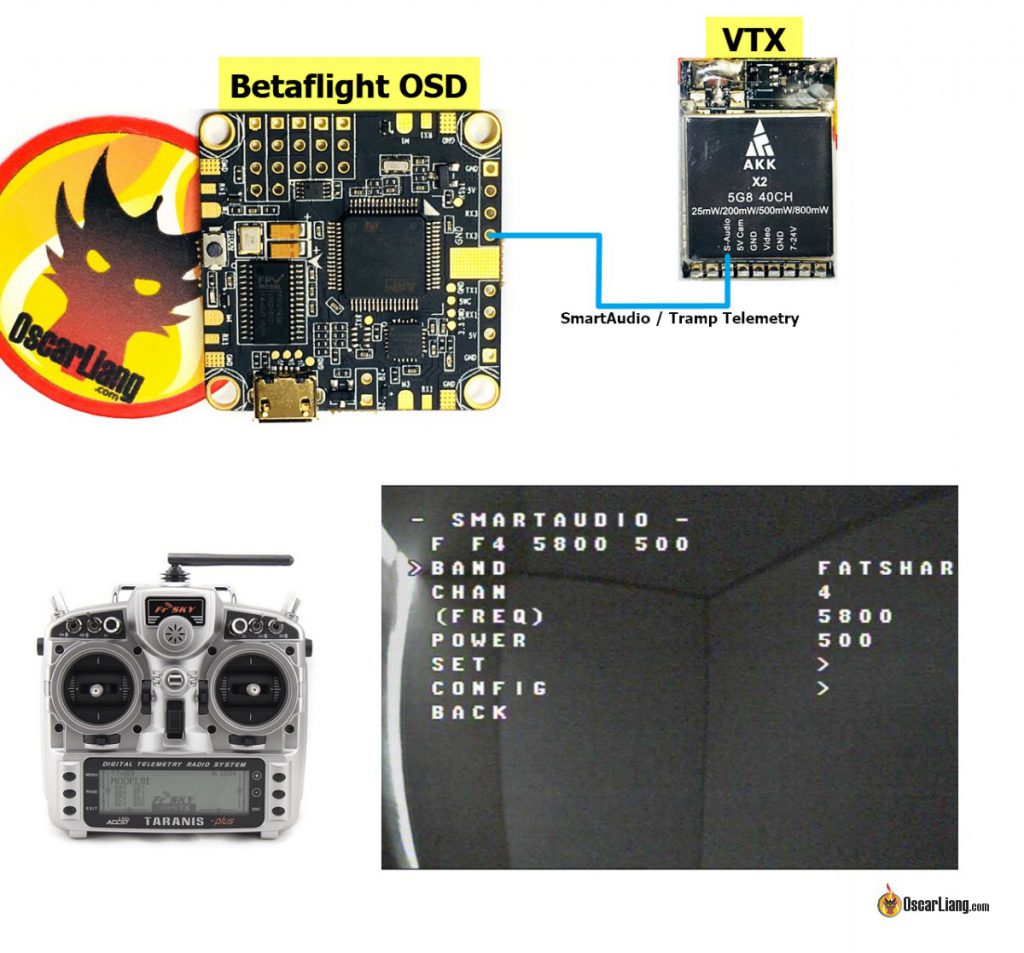
Пример подключения Betaflight F4 FC и AKK X2 VTX
Настройки в Betaflight
В Betaflight Configurator’е переходим на закладку Port, в столбце Peripherals (периферия) нужного последовательного порта выбираем протокол для вашего видеопередатчика.
Сохраняем настройки (кнопка Save), контроллер должен перезагрузиться.
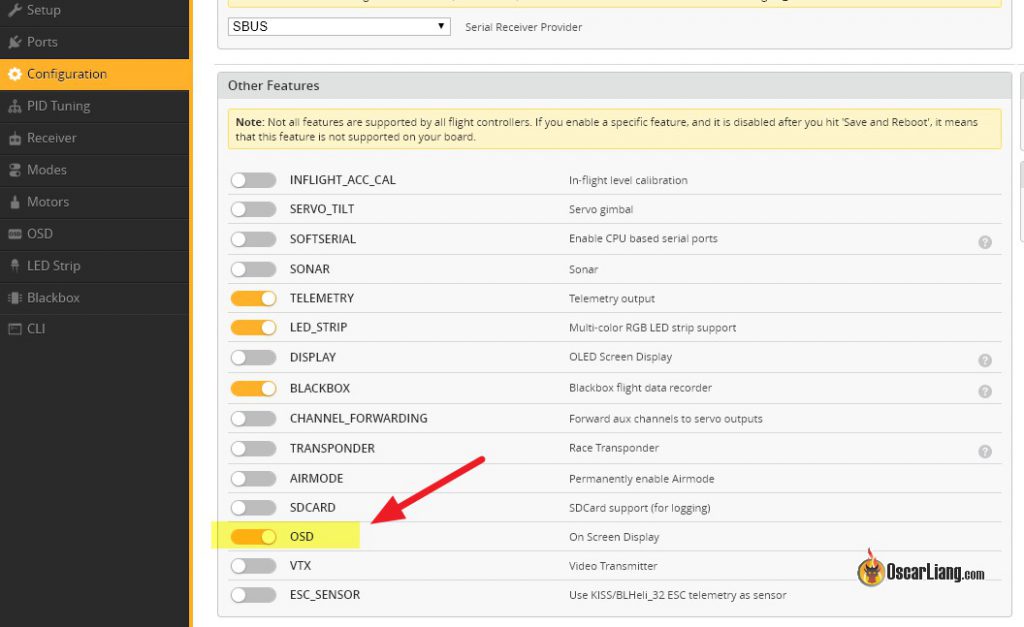
Теперь переходим на вкладку Configuration, и включаем OSD. Если вы новичок, то вот руководство по использованию Betaflight OSD.
Сохраняем настройки (Save), на этом всё. Теперь у вас должен быть доступ к Betaflight OSD и вы сможете увидеть настройки видеопередатчика.
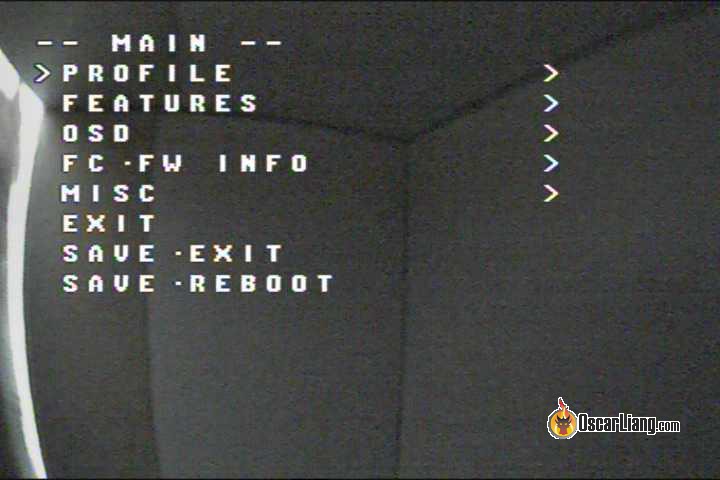
Чтобы попасть в Betaflight OSD, просто нужно перевести газ в центр, курс влево (yaw влево), а тангаж (pitch) от себя (в mode 2: левый стик влево-в центр, правый — вперед).
Выбираем «Feature» в меню.
«VTX SA» для SmartAudio и «VTX TR» для Tramp Telemetry, выбирайте нужный вам вариант.
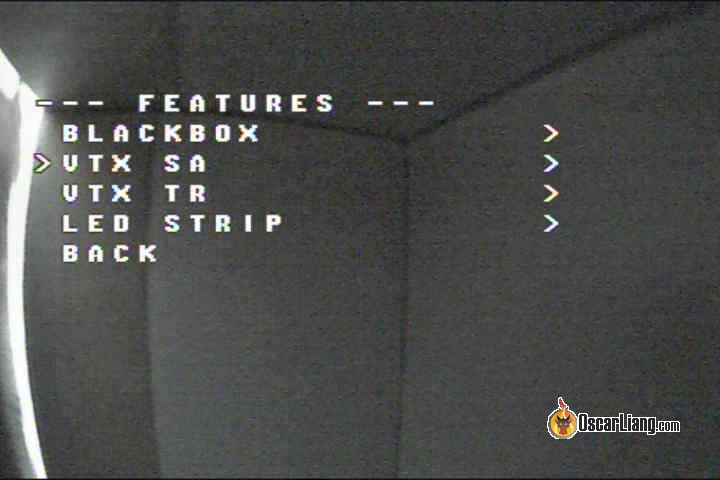
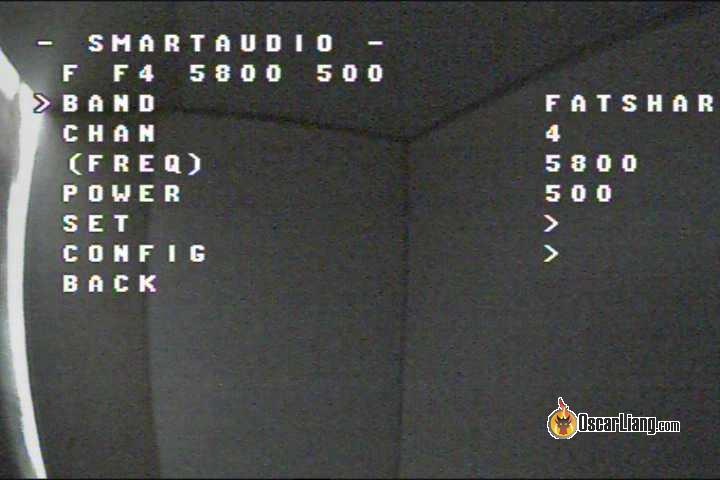
На этом экране вы должны видеть настройки видеопередатчика.
Если данные не отображаются, тогда что-то не так с подключением или с настройками порта. Попробуйте другой последовательный порт. Если ничего не помогло, тогда можно попробовать программную эмуляцию последовательного порта (SoftSerial).
Интерфейс не требует объяснений, тут вы можете поменять сетку частот, канал и выходную мощность. Чтобы сохранить настройки выберите «SET» и затем «Confirm«.
 Если у вас нет Betaflight OSD, то знайте, что управление видеопередатчиком работает и через MnimOSD, вот руководство на английском: http://intofpv.com/t-control-vtx-through-minimosd
Если у вас нет Betaflight OSD, то знайте, что управление видеопередатчиком работает и через MnimOSD, вот руководство на английском: http://intofpv.com/t-control-vtx-through-minimosd
Как менять настройки видеопередатчика прямо с Тараниса, при помощи LUA скрипта
Для того чтобы управлять видеопередатчиком с Taranis нужно:
На диаграмме ниже показана схема соединения:
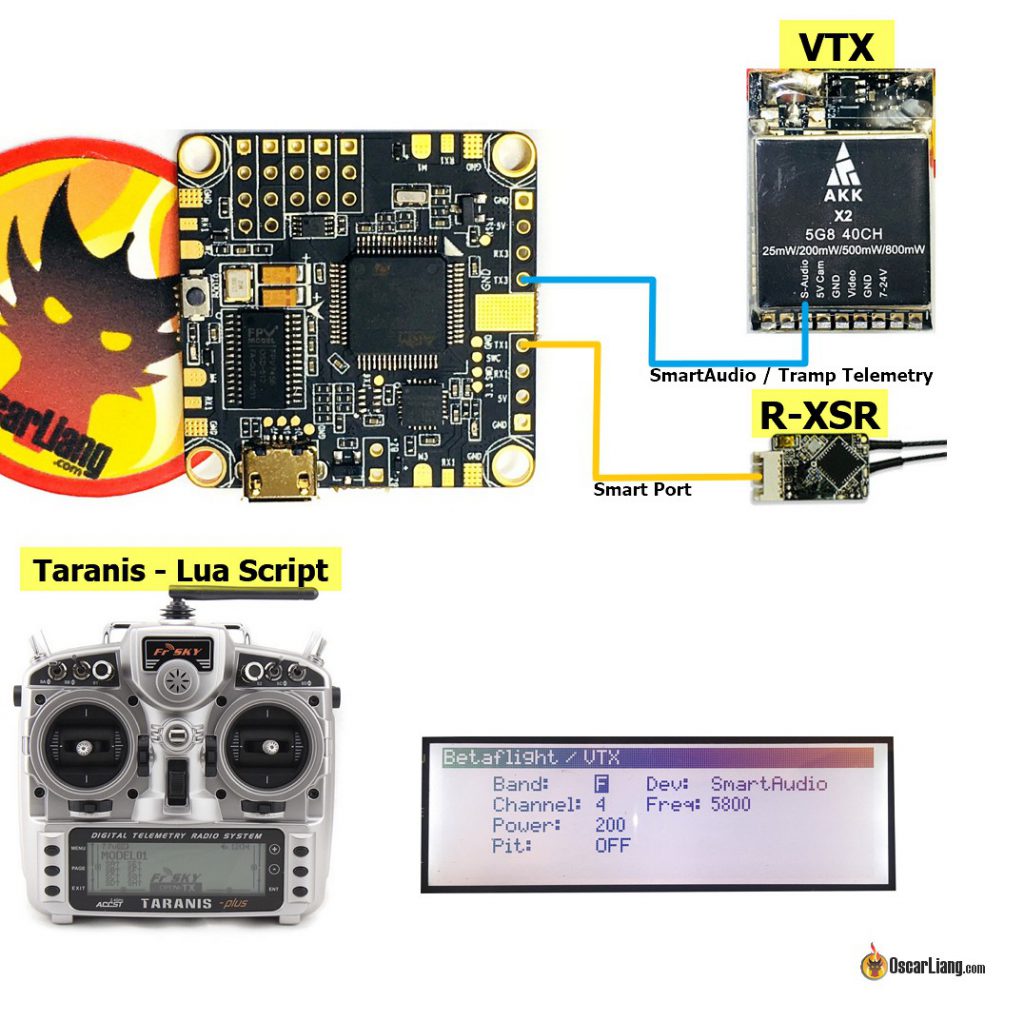
Пример соединения Betaflight F4 FC, R-XSR и видеопередатчика AKK X2
Теперь должна появится возможность менять настройки видеопередатчика, PID, рейты, прямо с Тараниса, правда удобно?
Не работает?
Если вы не видите страницу VTX в LUA скриптах, но видите страницы PID и Rate, тогда что-то не так с подключением по SmartAudio/ TrampTelemetry или с настройками порта для них. Можно проверить работает ли управление через Betaflight OSD.
Если ни одна из страниц LUA скриптов не видна (VTX, PID, Rate), тогда проблема с LUA скриптами в Таранисе. Если вы используете приемник R-XSR, то нужно обновить прошивку (201710хх), в которой исправлен баг с LUA скриптами (вот руководство по обновлению прошивок в приемниках FrSky). Также попробуйте использовать другой порт или SoftSerial.
Как поменять настройки видеопередатчика в Betaflight OSD или прямо с Тараниса : 2 комментария
RCDetails Blog
О коптерах и не только
Заставляем работать SmartAudio и Tramp в Betaflight 4.1 при помощи VTXTables

В дефолтной конфигурации Betaflight 4.1. больше не работают протоколы управления видеопередатчиками SmartAudio и Tramp. В зависимости от используемого протокола и передатчика нужно настроить «VTX tables» (таблицы частот).
Почему? Что такое «VTX tables»?
Раньше всё было заранее настроено, и ничего не приходилось менять. Начиная с Betaflight 4.1 каналы и мощность нужно настраивать вручную. Это делается при помощи команды VTXTable в консоли.
Да, это раздражает и сбивает с толку. Если не хотите заморачиваться, просто используйте более старую версию Betaflight.
Чтобы настроить управление видеопередатчиком, вам нужно знать какие каналы и какую выходную мощность он поддерживает. Также нужно проверить местные законы и убедиться, что частоты и выходная мощность находятся в разрешенных диапазонах. Если вы нарушите закон, то Betaflight не будет нести за это ответственность, видимо это одна из причин внедрения VTXTables.
Есть и плюсы, вы можете сохранить только самые часто используемые каналы и убрать те, что вам точно не понадобятся.
Копируем и вставляем в консоль
Это должно сработать (скорее всего) для большинства видеопередатчиков, просто скопируйте нужную таблицу в консоль Betaflight. Замечу, что эти таблицы содержат все каналы (некоторые из которых запрещены в штатах).
Главное выяснить какой протокол использует ваш видеопередатчик: Tramp, SmartAudio V1.0, V2.0 или V2.1.
Определяем протокол управления видеопередатчиком
Оригинальное руководство на англ. языке найдено тут.
IRC Tramp
SmartAudio 1.0
SmartAudio 2.0
SmartAudio 2.1
Все эти скрипты скопированы с Github, в любом случае рекомендую ознакомиться с оригинальным документом: https://github.com/betaflight/betaflight/blob/master/docs/VTX.md#vtx-table
Настраиваем VTXTables под себя
Вы можете, и, чтобы управление работало, должны настроить таблицы под свой видеопередатчик.
Если поставить частоту равной 0, то этот канал исчезнет, это исключает возможность случайной передачи на запрещенной частоте или на канале, который вы не хотели бы использовать.
Можно поменять powerlevelsnumber (число уровней мощности), powervalues (значения выходной мощности в dB) и powerlabels (наименования этих мощностей, например в мВт).
Я тестировал не все эти таблицы, но их все равно можно попробовать.
Eachine Nano VTX
Eachine VTX03S
AKK Ultimate VTX
RDQ Mach3
Diamond VTX (используется во множестве коптеров Happymodel)
Eachine TX805
TBS Unify Pro HV
Позже добавлю и другие видеопередатчики. Дайте знать, что я упустил.
По этой ссылке есть очень много таблиц, но все они в формате JSON, т.е. вы должны скачать файл, и дальше на вкладке Video Transmitter выбрать Load From File.
Заставляем работать SmartAudio и Tramp в Betaflight 4.1 при помощи VTXTables : 2 комментария
Нравится читать твой блог, спасибо.
Но тут сразу проблема, на вкладке Сенсорс параметр Дебаг вообще ничего не дает, просто синяя полоса. В чем может быть дело?
Параметры (частота, канал, мощность) не меняются, поэтому линия горизонтальная, без изменений. Просто смотрите текущее значение. В статье приведена расшифровка.
RCDetails Blog
О коптерах и не только
Как поменять настройки видеопередатчика в Betaflight OSD или прямо с Тараниса

Управление видеопередатчиком — это новый функционал в мире мини коптеров, позволяет менять номер канала и выходную мощность при помощи Betaflight OSD или прямо с пульта Taranis, используя LUA скрипты. Этот функционал часто называют «VTX Control» или «VTX Telemetry».
Больше не нужно путаться с дип переключателями и кнопками!
Все становится намного проще благодаря тому, что параметры видеопередатчика можно менять удаленно, используя аппаратуру управления. Возможно это звучит не очень круто, но после того, как я попробовал эту штуку пару раз, то был ошарашен тем, как это удобно, и теперь я всем настоятельно рекомендую попробовать!
Управление видеопередатчиком полезно, например, во время гонки и если вы упали, тогда можно включить режим PitMode на видеопередатчике не ломясь к квадрику. Это минимизирует помехи другим пилотам, и теоретически защищает передатчик от перегрева из-за недостаточного охлаждения.
Ограничение
Единственная проблема с удаленным управлением видеопередатчиком через OSD — это необходимость выбора правильного канала в самом начале, иначе придется пройтись по всем каналам на приемнике, чтобы найти текущий.
Поэтому управление прямо с Тараниса будет удобнее (при помощи LUA скрипта), и вы сможете менять настройки вне зависимости от того, какой канал сейчас активен.
Видеопередатчики, которые поддерживают удаленное управление
Есть несколько разных протоколов управления видеопередатчиками, они позволяют менять настройки как с аппаратуры управления, так и через Betaflight OSD.
Однако большинство производителей видеопередатчиков используют либо «Tramp Telemetry«, либо «SmartAudio«. Ниже список довольно новых видеопередатчиков, поддерживающих эти протоколы:
Все эти протоколы нужны для одного и того же, и настройки в Betaflight Configurator’е будут идентичными, за исключением одного параметра, где вы выбираете необходимый протокол.
Подключение
Нужно подключить всего один проводок!
Подключение разных видеопередатчиков одинаковое, различия только в названиях контактов. Для видеопередатчиков с протоколом Tramp Telemetry, контакт обычно называется «Telemetry«, в случае с протоколом SmartAudio — название будет «Audio» или «SmartAudio«. Иногда встречается название FC UART…
Просто подключите «Telemetry» или «SmartAudio» к контакту TX свободного последовательного порта.
Пример подключения Betaflight F4 FC и AKK X2 VTX
Настройки в Betaflight
В Betaflight Configurator’е переходим на закладку Port, в столбце Peripherals (периферия) нужного последовательного порта выбираем протокол для вашего видеопередатчика.
Сохраняем настройки (кнопка Save), контроллер должен перезагрузиться.
Теперь переходим на вкладку Configuration, и включаем OSD. Если вы новичок, то вот руководство по использованию Betaflight OSD.
Сохраняем настройки (Save), на этом всё. Теперь у вас должен быть доступ к Betaflight OSD и вы сможете увидеть настройки видеопередатчика.
Чтобы попасть в Betaflight OSD, просто нужно перевести газ в центр, курс влево (yaw влево), а тангаж (pitch) от себя (в mode 2: левый стик влево-в центр, правый — вперед).
Выбираем «Feature» в меню.
«VTX SA» для SmartAudio и «VTX TR» для Tramp Telemetry, выбирайте нужный вам вариант.
На этом экране вы должны видеть настройки видеопередатчика.
Если данные не отображаются, тогда что-то не так с подключением или с настройками порта. Попробуйте другой последовательный порт. Если ничего не помогло, тогда можно попробовать программную эмуляцию последовательного порта (SoftSerial).
Интерфейс не требует объяснений, тут вы можете поменять сетку частот, канал и выходную мощность. Чтобы сохранить настройки выберите «SET» и затем «Confirm«.
Если у вас нет Betaflight OSD, то знайте, что управление видеопередатчиком работает и через MnimOSD, вот руководство на английском: http://intofpv.com/t-control-vtx-through-minimosd
Как менять настройки видеопередатчика прямо с Тараниса, при помощи LUA скрипта
Для того чтобы управлять видеопередатчиком с Taranis нужно:
На диаграмме ниже показана схема соединения:
Пример соединения Betaflight F4 FC, R-XSR и видеопередатчика AKK X2
Теперь должна появится возможность менять настройки видеопередатчика, PID, рейты, прямо с Тараниса, правда удобно?
Не работает?
Если вы не видите страницу VTX в LUA скриптах, но видите страницы PID и Rate, тогда что-то не так с подключением по SmartAudio/ TrampTelemetry или с настройками порта для них. Можно проверить работает ли управление через Betaflight OSD.
Если ни одна из страниц LUA скриптов не видна (VTX, PID, Rate), тогда проблема с LUA скриптами в Таранисе. Если вы используете приемник R-XSR, то нужно обновить прошивку (201710хх), в которой исправлен баг с LUA скриптами (вот руководство по обновлению прошивок в приемниках FrSky). Также попробуйте использовать другой порт или SoftSerial.
Как поменять настройки видеопередатчика в Betaflight OSD или прямо с Тараниса : 2 комментария
Irc tramp что это
Cleanflight supports control of VTX modules.
Current support includes
If your FC has a button, excluding a BOOT buttons, then it can be used for VTX control.
Some boards like the SPRacingF3NEO have both a VTX module and a button. Other boards like the SPRacingF3MINI have multiple buttons.
While the VTX button is held the STATUS 2 LED will flash N times per second indicating the action that will be taken when the button is released. The flashing starts as soon as the button is held. e.g. You press the button, count flashes and then release as appropriate.
| Duration | Function | Flashes |
|---|---|---|
| 25ms to 1s | Cycle Channel | 4 |
| 1s to 3s | Cycle Band | 3 |
| 3s to 5s | Cycle Power and RF Power | 2 |
| 5s or more | Save FC settings | 1 |
Example to cycle VTX power
The VTX button works with ALL VTX systems including onboard RTC6705, Tramp and SmartAudio.
If the VTX can be turned off then POWER 0 will turn off the VTX and POWER 1 will set the VTX into it’s lowest power output. If the VTX cannot be turned off then POWER 0 will set the VTX into it’s lowest power output.
As of Betaflight 4.1.0, band/channel and power level information needed to control videotransmitters is no longer hardcoded, but stored in a new facility called vtxTable.
The contents of the vtxTable need to be setup manually. They need to match the hardware, local laws and regulations, as well as user preferences.
The contents of the table can be examined by typing the command vtxtable into the cli. Example:
Bands and channels
The example above contains 5 bands, each with a name, a single-letter abbreviation, a factory flag and eight frequencies.
The factory flag controls how Betaflight communicates with the vtx.
Entries of the vtxtable can be blocked by setting their frequency to 0. This is especially useful for bands set to FACTORY : The spots of unwanted entries of the videotransmitter’s built-in table can be set to 0, effectively disabling them. In the example above this was used to only allow frequencies between 5725 and 5875 MHz, as a German pilot would want it to comply with German laws. Additionally, the Fatshark band was replaced with a new custom one.
As a starting point, the following table contains the commonly used frequencies:
In addition the the frequency, videotransmitters also need to know how much power they should use for transmission. The example shown previously contains three power levels, each with a value and a label. The label is shown to the user in the OSD, while the value is sent to the vtx.
Power levels should be setup to match the hardware in use.
IRC Tramp devices should use:
rtc6705 should use:
Please note that turning off rtc6705 devices is not possible using powervalues. Use pitmode instead.
SmartAudio V1.0 devices should use:
SmartAudio V2.0 devices should use:
SmartAudio V2.1 devices vary depending on their model. Check the manufacturers website.
For these devices the powervalues are the output power in dBm.
To query the available power levels from a SmartAudio 2.1 VTX enter the vtx_info command with no parameters. This will report the available power settings thus:
Вопросы по iNav
Опции темы
У меня на резиновых стойках но не думаю что в этом дело. К тому же в последних прошивках множество фильтров которые хорошо борятся с вибрациями
Для борьбы с вибрацией перебрал весь коптер. Поставил резиновые стойки. Результат минимальный. Регули, двиги,пропы и прошивки(даже старую 1.9.1-вообще жесть вибрации). Так вот по моим наблюдениям наибольшую вибрацию дают двиги и пропы(у меня где-то в районе 90-100 герц). Если и то и другое г-но, никакие фильтры не помогут.
Ну. стойки это уже виброразвязка. мне хватает только их. но только я не собирал ещё больших дронов. от 5″ до 8″ хватает.
Вибрации дает винто-моторная группа. А у стоек тоже есть своя резонансная частота. Нужно все тщательно подбирать и настраивать, что бы не трясло.
Блин, а мне видимо не хватит. Рама 360мм карбон, ничего особенного. После работы попробую стельки под моторы подложить.
Вообще, неудивительно, что есть вибрации на ПК, ибо он закреплен прямо на один из винтов луча, получается, что со всех 4 лучей вибрации идут прямо на крепления ПК..
Тоже хочу попробовать. Но только подкладывать буду резинки от старой велосипедной камеры(нужно порыться в закромах).
Я подкладывал, потом убрал (разницы не было\или не заметил). только один нюанс. у меня и без стелек работало всегда более\менее.
Если есть подозрение на вибрации к полетнику, можно его в на пробу открутить со стоек, замотать в паролон и примотать к раме (например резинкой). Хоть понять, в этом дело или нет. Мой 405ctr стоит на пластиковых винтах м3 и на штатных силиконовых проставках.
Посмотрел Ваш лог с Inav. Мотор 2 (передний правый) вообще молчит почему то. Гиро вроде работает, но по яву с ума сходит (видно когда крутиться?  ) И еще не понятно, у Вас моторы начинают крутиться только после команды со стика газа? После того, как за армили они на месте стоят?
) И еще не понятно, у Вас моторы начинают крутиться только после команды со стика газа? После того, как за армили они на месте стоят?
5 дюймовый квад, камера мобиус. Inav 2.5.2. Настройки по умолчанию.
Кроме начала и конца основной полет режим анжел.
Ветер 5-6 метров в сек, порывами до 9.
с 2.29, монтаж лень делать.
для себя давно сделал вывод, качественные моторы, пропы и рама главное в борьбе с вибрацией.
сам квад
Да, я на него тоже внимание обратил. Но по факту моты настроены на 5% газа при арминге, хотя в логе этого нет (почему-то), глазами я это вижу..
Ну и, хз. Опытным путём выясняется, что дело в вибрациях, ибо, если их устранить, показания YAW Для квадрика становятся стабильными. Зря я раньше не додумался этот тест провести, так бы завтра уже на шаг впереди был
Зато теперь и моторы с проставками и полётник, так что камеру можно будет крепить жестко.
Это чудо, как круто он летает! Даже попробовал акро.
Зато теперь и моторы с проставками и полётник, так что камеру можно будет крепить жестко.
Это чудо, как круто он летает! Даже попробовал акро.
Рад за Вас. Даже и не мог подумать, что вибрации способны на такие чудеса.
Еще посмотрел список комплектующих на Ваш матек f405std. Там указано, что стоит гира ICM20602, вроде как более шумная и капризная, чем MPU6000 установленный на F405CTR.
Спасибо!) Неделя побед прямо. Вчера обезвредили угонщика) В полиции весь вечер провели
Вы про эти настройки?
Ставим на UART3, вместо TBS SmartAudio, IRC Tramp.
Ссылка на передатчик Matek
http://www.mateksys.com/?portfolio=vtx-hv#tab-id-5
у matek f411 wse только два uart’a аппаратных и два софтовых, аппаратные у меня заняты gps и приёмником. софтовый идет на vtx, попробую конечно перекинуть gps на софтовый, самолёту не критично, а на первый vtx, но в этом ли дело.
p.p.s. все вопросы снимаются, затупил сам
Это невозможно. Или я чего-то не понимаю в этой жизни.
Он имел в виду софтсериал
Только там обязательно задать скорость порта не выше 19200 (9600 чтобы наверняка) и частоту обновления координат делать 1 Гц вместо 10.
Где правильнее всего увеличивать расходы серв для ручного режима?
всё, решил откат на прошивку передатчика к версии 1.5.
Там же софтсериал, который передает инфу. Или gps по одному rx может координаты передавать?
Софтсериал, если он «полноценный» (rx+tx, есть такой таргет) ничем, кроме скоростных характеристик, не отличается от хардсериала.
А что конеретно крутить,хода элевонов мало,сильно зажаты?
а кто знает какой параметр отвечает за удержание высоты при rth? у меня на s800 при возврате получается странная история: сначала крыло поднимается на высоту rth altitude, а при развороте (визуально радиус значительно превышает заданный) начинает сильно набирать скорость и снижаться, при этом автопосадка у меня отключена. до предела я его не опускал, отключал rth, чтоб не вскапать поле. ни разу не наблюдал подобного на z84 при аналогичных настройках, остальные автоматические режимы работают корректно.



