Общие сведения:
Подключение:
Шина поддерживает подключение до 112 устройств (при 7-ми битной адресации) по двум проводам (плюс GND и Vcc), может иметь несколько ведущих и ведомых. При использовании нескольких ведущих, каждый из них должен поддерживать этот режим и уметь определять состояние занятой шины.
I²C на Arduino
Arduino UNO R3/Piranha UNO
На Arduino UNO R3/Piranha UNO шина I2C находится на выводах A4, A5. Также в эти выводы продублированы на колодке с цифровыми выводами рядом с кнопкой Reset.
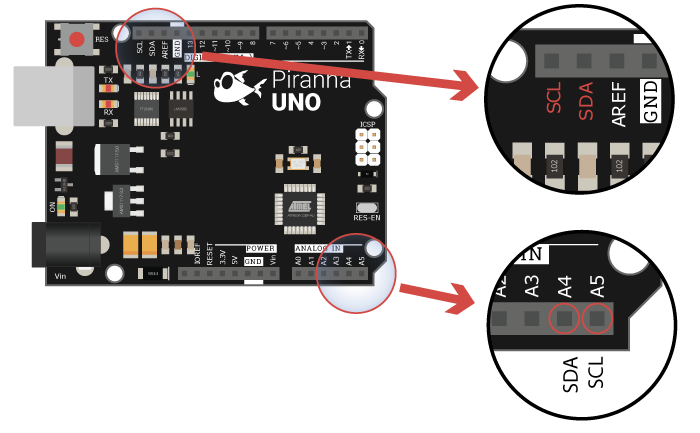
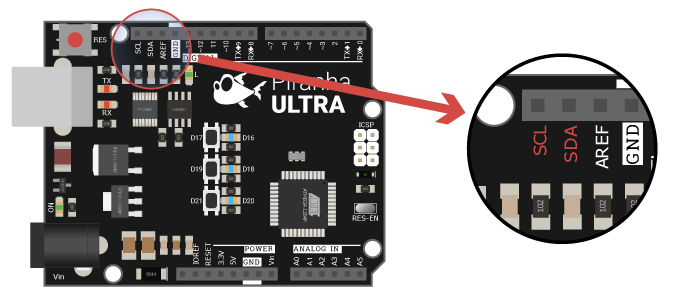
Piranha ULTRA
На Piranha ULTRA шина I²C не занимает аналоговые выводы A4, A5 и находится на цифровой колодке рядом с кнопкой Reset, выводы обозначены SDA и SCL
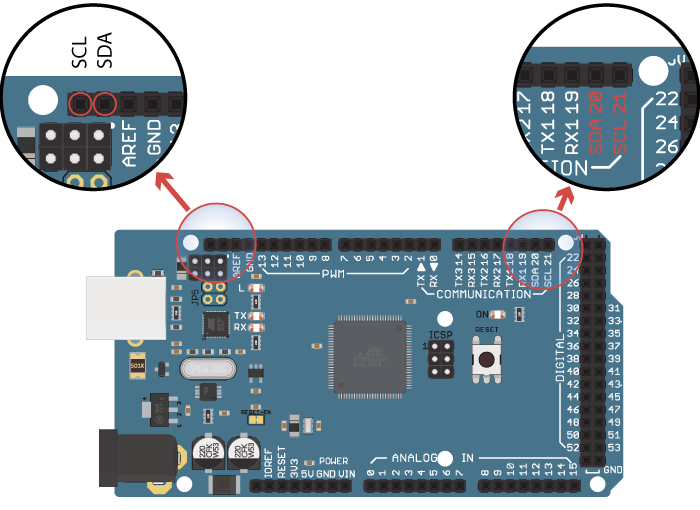
Arduino MEGA R3
На Arduino MEGA R3 шина I²C находится на цифровой колодке на крайних выводах, близких к разъёму USB и на выводах 20, 21. Выводы объединены.
Примеры для Arduino
В этом примере на матрицу выводится изображение стрелки. Стоит заметить, ко всем нашим модулям написаны библиотеки с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке.
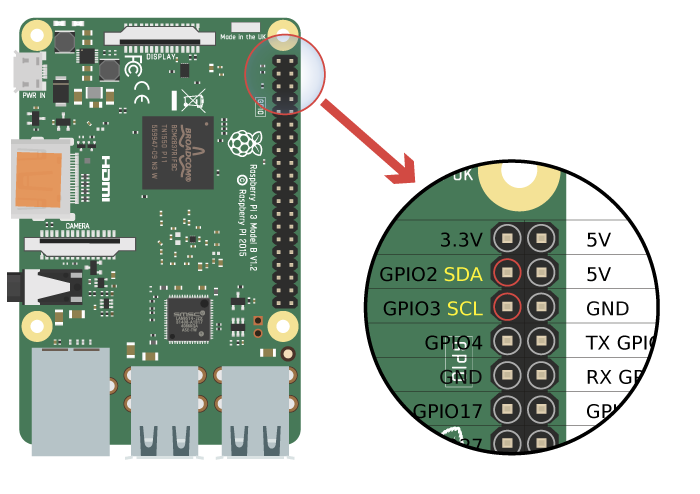
I²C на Raspberry Pi
На Raspberry Pi I²C выводы это 3-й и 5-й выводы колодки, GPIO2 и GPIO3 по номенклатуре BCM и выводы 8, 9 по номенклатуре WiringPi.
Примеры для Raspberry
Подробнее о шине I²C:
Резисторы, ёмкость и длина линий шины
В официальном описании от NXP ничего не сказано о максимальной длине шины, но не стоит этим злоупотреблять. Шина была придумана для обмена информации между интегральными схемами в пределах одной платы одного устройства. В расчёт бралась только паразитная ёмкость линии, которая сказывается на скорости нарастания фронта волны. От этой ёмкости зависит номинал подтягивающих резисторов. Можно подобрать резисторы так, чтобы фронт волны нарастал согласно спецификации и при 100-метровой длине проводов, но это не избавляет от помех, которые влечёт за собой несимметричная электрическая реализация. Опять же, при слишком маленьком сопротивлении качество сигнала улучшается, но при этом растёт ток который необходимо пропускать устройствам через выводы для притяжки линий.
При использовании шины на модулях не существует принятого стандарта установки подтягивающих резисторов на ведущем или ведомом. У Arduino подтягивающие резисторы отсутствуют и для работы с шиной нужен хотя бы один модуль с ними. У Raspberry Pi на плате установлены подтягивающие резисторы номиналом 1,7 килоОм и для неё нет необходимости в подтяжке на модулях.
Сигналы и специальные биты шины
Устанавливаемые только ведущим
Устанавливаемые ведущим и ведомым
Обмен данными
При обмене данными тактированием занимается только ведущий, а ведомый может удерживать линию тактирования только если не успевает за ведущим, так называемое растягивание тактирования (clock-stretching). Не все модули поддерживают удержание. Установка бита на линии данных может происходит в момент, когда линия тактирования прижата, а считывания, когда линия отпущена (подтянута к Vcc), но в большинстве случаев это происходит по фронту волны на линии тактирования.
Рассмотрим пример простого обмена данными:
Запись в регистры ведомого. Данные взяты из примеров, приведённых выше.
После сигнала Start и указания адреса ведущий записывает адрес регистра с которого будет производиться дальнейшая запись. Стоит заметить, что у ведомого есть внутренний счётчик и каждый последующий байт после подтверждения будет записан в следующий регистр. Таким образом байт со значением 0x00 будет записан в регистр 0x11, байт со значением 0x18 будет записан в регистр 0x12, байт со значением 0x3C будет записан в регистр 0x13 и т. д. В этом примере биты ACK устанавливает ведомый.
Вот так сигналы этого примера выглядят на осциллографе:
Чтение из регистров ведомого. Предположим, мы хотим прочитать байт из регистра 0x13.
После сигнала Start и указания адреса ведущий записывает адрес регистра, который необходимо прочитать. Далее следует сигнал Restart (или Stop, затем Start). Ведущий снова выводит адрес ведомого, но уже с битом Read (чтения). Ведомый устанавливает бит ACK и во время следующих 8-ти импульсов тактирования выводит данные на линию SDA. На девятом импульсе уже ведущий устанавливает бит ACK (или NACK, если данные не удалось прочитать) и завершает обмен сигналом Stop.
Скорость
Первоначальный стандарт I²C был реализован на скорости 100 кГц. С тех пор появились и другие реализации шины, но большинство устройств работают на этой скорости. Так же известны случаи когда скорость шины специально снижена, чтобы увеличить расстояние передачи и уменьшить чувствительность к помехам. Не все модули могут работать на сниженной скорости.
Электроника для всех
Блог о электронике
Интерфейсная шина IIC (I2C)
Логический уровень
Как передаются отдельные биты понятно, теперь о том что эти биты значат. В отличии от SPI тут умная адресная структура. Данные шлются пакетами, каждый пакет состоит из девяти бит. 8 данных и 1 бит подтверждения/не подтверждения приема.
После адресного пакета идут пакеты с данными в ту или другую сторону, в зависимости от бита RW в заголовочном пакете.
Вот, например, Запись. В квадратиках идут номера битов. W=0
 |
Задача решается так:
 |
С записью все понятно — записали вначале адрес, а потом следом записали данные. А умная микросхема все прекрасно поняла и рассовала по ячейкам. А с чтением? А с чтением все через задницу, в смысле через запись.
 |
Скриншот с осциллографа RIGOL 1042CD
Вроде бы все, практический пример с AVR будет потом, а пока помедитируйте над диаграммой работы конечного автомата TWI передатчика ATmega8. Скоро я вас буду этим грузить!
 |
Страшна? 😉 На самом деле там все не так брутально. Можно обойтись вообще парой десятков строк кода на ассемблере.
Спасибо. Вы потрясающие! Всего за месяц мы собрали нужную сумму в 500000 на хоккейную коробку для детского дома Аистенок. Из которых 125000+ было от вас, читателей EasyElectronics. Были даже переводы на 25000+ и просто поток платежей на 251 рубль. Это невероятно круто. Сейчас идет заключение договора и подготовка к строительству!
А я встрял на три года, как минимум, ежемесячной пахоты над статьями :)))))))))))) Спасибо вам за такой мощный пинок.
200 thoughts on “Интерфейсная шина IIC (I2C)”
(1) OpenID работает криво. Я зашёл как blacklion.livejournal.com и всё равно справа-сверху «войти» (а не «выйти») и не даю комментировать. Пришлось регистрироваться и теперь тут два меня.
(2) Софтового мастера сделать не сложно. А вот слейва как-то просто не получается.
Щас попробую с опен ид поиграться.
Более того, многие предпочитают делать софтовый И2С мастер чтобы не заморачиваться с встроенным в TWI конечным автоматом.
Более того, многие предпочитают делать софтовый И2С мастер чтобы не заморачиваться с встроенным в TWI конечным автоматом.
Я когда первый раз подходил к электронике смотрел на PIC (зачем я это делал!? Зачем на PIC?!) так реализовал мастера в качестве упражнения за вечер. А вот слейва так и не осилил…
Я сделал софтового слейва на AT89C2051, но работало жутко медленно.
плюсадин. я уже раз 5 жаловался что логины глючат 😀 нашел выход, что залогинился, пару минуток подождал и рефреш. работает, но бесит :\
DI HALT спасибо за статью. Давно ждал рассказ про I2C. 🙂
У меня их почти полный аналог ICL12008 ваще работать не хотят — не отзываются на свой адрес, не дают ACK
и у тебя, Брут? я изъебался с их инициализацией — не пашут и все. взял ds, который считал сгоревшим и не рабочим, по по недоразумению не выкинул — и он заработал. в топку эти ISL, от лукавого они..
А у меня 5 штук их лежит — сэмплы. Надо бы в ST гневный мессадж накатать. МОл чо вы за говно нам подсунули?
Да, есть такое дело 🙂 Вообще при начале работы с IIC девайсом, желательно вдоль и поперек изучить Datasheet к нему. В свое время тоже поломал голову с m41 от ST. Вроде все пишется, все читается, но часы стоят и все тут. Оказалось там есть хитрый битик, который при пропадании всего питания — Vcc и Vbat, останавливает часы и пока его не сбросишь они не пойдут.
Ну и еще обычный прикол с часами, что не все могут работать при отключенной батарейке — даже если Vcc есть, внутри у них стоит контроль, который проверяет разницу между напругой и Vbat, и если Vbat нет, то часы просто ни на что не отвечают 🙂
p.s. а про NACK в конце чтения это да, самые популярные грабли наверно. Кстати для отлаживания шины если нет крутого осцила, можно прикрутить I2C Sniffer на Atmega8 — оч удобная штука, она в консоли показывает полностью весь обмен в удобоваримом виде.
А чё с ним было голову ломать? Кстати, m41t56 рекомендую, простые и удобные I2C часы. Про битик я давно знал — он у всех часовых изделий от ST присутствует. Наверное, как совместимость с m48t08 — который с батареей на борту. Чтобы батарею не сажать, пока таймкипер лежит на складе, они глушат часы.
О)) На самом деле классная тема! Мне бы сначала с простым UARTом разобраться, а потом только к творению Philips)) Буду ждать исходников…
Отличная статья! А есть последняя диаграмма только в чуть лучшем качестве? А то буквы трудно различить.
Красные пути — нормальная работа
Синие — возможные косяки.
Использование интерфейса I2C в Arduino – полное руководство

В этом проекте мы будем использовать протокол I2C для обмена данными между двумя платами Arduino и передавать между ними значения (от 0 до 127) с помощью потенциометра. Эти принятые значения будут отображаться на ЖК дисплеях, подключенных к каждой плате Arduino. Одна из плат Arduino будет выступать в роли ведущего (Master), а другая – в роли ведомого (Slave).
Что такое протокол I2C и как он работает
Термин IIC расшифровывается как “Inter Integrated Circuits” и часто обозначается как I2C или даже как TWI (2-wire interface protocol), но во всех случаях за этими обозначениями скрывается один и тот же протокол. I2C представляет собой протокол синхронной связи – это значит что оба устройства, которые обмениваются информацией с помощью данного протокола должны использовать общий сигнал синхронизации. Поскольку в этом протоколе используются всего 2 линии (провода), то по одной из них должен передаваться сигнал синхронизации, а по другой – полезная информация.
Впервые протокол I2C был предложен фирмой Phillips. Протокол в самом простом случае соединяет с помощью 2-х линий 2 устройства, одно из устройств должно быть ведущим, а другое – ведомым. Связь возможна только между ведущим и ведомым. Преимуществом протокола (интерфейса) I2C является то, что к одному ведущему можно подключить несколько ведомых.
Схема связи с помощью протокола I2C представлена на следующем рисунке.

Назначение линий данного интерфейса:
В любой момент времени только ведущий может инициировать процесс обмена данными. Поскольку в этом протоколе допускается несколько ведомых, то ведущий должен обращаться к ним, используя различные адреса. То есть только ведомый с заданным (указанным) адресом должен отвечать на сигнал ведущего, а все остальные ведомые в это время должны «хранить молчание». Таким образом, мы можем использовать одну и ту же шину (линию) для обмена данными с несколькими устройствами.
Уровни напряжений для передаваемых сигналов в интерфейсе I2C жестко не определены. В этом плане I2C является достаточно гибким, то есть если устройство запитывается от напряжения 5v, оно для связи с помощью протокола I2C может использовать уровень 5v, а если устройство запитывается от напряжения 3.3v, то оно для связи с помощью протокола I2C может использовать уровень 3v. Но что делать если с помощью данного протокола необходимо связать между собой устройства, работающие от различных питающих напряжений? В этом случае используются преобразователи/переключатели напряжения (voltage shifters).
Существует несколько условий для осуществления передачи данных в протоколе I2C. Инициализация передачи начинается с падения уровня на линии SDA, которое определяется как условие для начала передачи (‘START’ condition) на представленной ниже диаграмме. Как видно из этого рисунка, в то время как на линии SDA происходит падение уровня, в это же самое время на линии SCL ведущий поддерживает напряжение высокого уровня (high).

То есть, как следует из рисунка, падение уровня на линии SDA является аппаратным триггером для условия начала передачи. После этого все устройства на этой шине переключаются в режим прослушивания.
Аналогичным образом, повышение уровня на линии SDA останавливает передачу данных, что на представленной диаграмме обозначено как условие окончания передачи данных (‘STOP’ condition). В это же самое время ведущим на линии SCL поддерживается напряжение высокого уровня (high).
На следующем рисунке представлена структура адреса ведомого в протоколе I2C.

Бит R/W показывает направление передачи следующих за ним байт, если он установлен в HIGH – это значит что будет передавать ведомый (slave), а если он установлен в low – это значит что будет передавать ведущий (master).
Каждый бит передается в своем временном цикле, то есть нужно 8 временных циклов чтобы передать байт информации. После каждого переданного или принятого байта 9-й временной цикл используется для подтверждения/не подтверждения (ACK/NACK) приема информации. Этот бит подтверждения (ACK bit) формируется либо ведомым, либо ведущим в зависимости от ситуации. Для подтверждения приема информации (ACK) на линии SDA ведущим или ведомым устанавливается низкий уровень (low) в 9 временном цикле, в противном случае происходит не подтверждение приема информации (NACK).
На следующем рисунке представлена структура передаваемого сообщения в протоколе I2C.

Где применяется протокол I2C
Протокол I2C используется для передачи информации только на короткие расстояния. Он обеспечивает достаточно надежную передачу данных из-за наличия в нем сигнала синхронизации. Обычно данный протокол используется для передачи информации от датчиков или других устройств ведущим устройствам. В данном случае несомненным удобством использования протокола I2C является то, что при обмене данными с ведомыми устройствами ведущий микроконтроллер использует минимум линий (контактов). Если вам нужна связь на более далекие расстояния, то вам необходимо присмотреться к протоколу RS232, если же вам нужна более надежная связь чем в протоколе I2C, то вам лучше использовать протокол SPI.
Протокол I2C в Arduino
На следующем рисунке показаны контакты платы Arduino UNO, которые используются для связи по протоколу I2C.

| Линия протокола I2C | Контакт платы Arduino UNO |
| SDA | A4 |
| SCL | A5 |
1. Wire.begin(address).
Эта команда производит инициализацию библиотеки Wire и осуществляет подключение к шине I2C в качестве ведущего (master) или ведомого (slave). 7-битный адрес ведомого в данной команде является опциональным и если он не указан [Wire.begin()], то устройство (плата Arduino) подключается к шине I2C в качестве ведущего (master).
2. Wire.read().
Эта функция используется для считывания байта, принятого от ведущего или ведомого.
3. Wire.write().
Эта функция используется для записи данных в устройство, являющееся ведомым или ведущим.
От ведомого ведущему (Slave to Master): ведомый записывает (передает) данные ведущему когда в ведущем работает функция Wire.RequestFrom().
От ведущему ведомому (Master to Slave): в этом случае функция Wire.write() должна использоваться между вызовами функций Wire.beginTransmission() и Wire.endTransmission().
Функцию Wire.write() можно использовать в следующих вариантах:
4. Wire.beginTransmission(address).
Эта функция используется для начали передачи по протоколу I2C устройству с заданным адресом ведомого (slave address). После этого вызывается функция Wire.write() с заданной последовательностью байт для передачи, а после нее функция endTransmission() для завершения процесса передачи.
5. Wire.endTransmission().
Эта функция используется для завершения процесса передачи ведомому устройству, который до этого был инициирован функциями beginTransmission() и Wire.write().
6. Wire.onRequest().
Эта функция вызывается когда ведущий запрашивает данные с помощью функции Wire.requestFrom() от ведомого устройства. В этом случае мы можем использовать функцию Wire.write() для передачи данных ведущему.
7. Wire.onReceive().
Эта функция вызывается когда ведомое устройство получает данные от ведущего. В этом случае мы можем использовать функцию Wire.read() для считывания данных передаваемых ведущим.
8. Wire.requestFrom(address,quantity).
Эта функция используется в ведущем устройстве чтобы запросить байты (данные) с ведомого устройства. После этого используется функция Wire.read() чтобы принять данные переданные ведомым устройством.
address: 7-битный адрес устройства, с которого запрашиваются байты (данные).
quantity: число запрашиваемых байт.
Необходимые компоненты
Работа схемы
Схема проекта по применению интерфейса I2C в плате Arduino представлена на следующем рисунке.
 Для демонстрации возможностей использования связи по протоколу I2C мы использовали две платы Arduino Uno с подключенными к ним ЖК дисплеями и потенциометрами. С помощью потенциометров будут определяться значения, передаваемые между платами в направлениях ведущий-ведомый и ведомый-ведущий.
Для демонстрации возможностей использования связи по протоколу I2C мы использовали две платы Arduino Uno с подключенными к ним ЖК дисплеями и потенциометрами. С помощью потенциометров будут определяться значения, передаваемые между платами в направлениях ведущий-ведомый и ведомый-ведущий.
Мы будем считывать аналоговое значение напряжения, подаваемое на контакт A0 платы Arduino с помощью потенциометра и преобразовывать его в цифровое значение в диапазоне от 0 до 1023 (с помощью АЦП на этом контакте). В дальнейшем эти значения с выхода АЦП (аналогово-цифрового преобразователя) будут преобразовываться в диапазон 0-127 поскольку мы можем передавать только 7-битные данные при помощи протокола I2C. Интерфейс I2C мы будем использовать на выделенных для него в плате Arduino контактах A4 и A5.
Значения на ЖК дисплее, подключенном к ведомой плате Arduino, будут изменяться в зависимости от положения потенциометра на ведущей стороне и наоборот.

Объяснение программ для Arduino
Нам будут необходимы две программы – одна для ведущей платы Arduino, а другая – для ведомой. Полные тексты обоих программ приведены в конце статьи, здесь же мы рассмотрим их основные фрагменты.
Объяснение программы для ведущей (Master) платы Arduino
1. Первым делом в программе мы должны подключить библиотеку Wire для задействования возможностей протокола I2C и библиотеку для работы с ЖК дисплеем. Также нам необходимо сообщить плате Arduino к каким ее контактам подключен ЖК дисплей.
Шина I2C. Основные понятия
В данной статье рассматриваются основные характеристики и преимущества протокола последовательной связи I2C (Inter-Integrated Circuit).
Связь через алфавитную кашу
Неудивительно, что общей особенностью электронных систем является необходимость обмена информацией между двумя или тремя или десятью отдельными компонентами. Инженеры разработали ряд стандартных протоколов, которые помогают различным микросхемам успешно общаться, что становится очевидным, когда вы сталкиваетесь с потоком сокращений в разделе «Связь» в списке характеристик микроконтроллера или сигнального процессора: UART, USART, SPI, I2C, CAN. Каждый протокол имеет свои плюсы и минусы, и важно немного знать о каждом из них, чтобы вы могли принимать обоснованные решения при выборе компонентов или интерфейсов.
Эта статья посвящена шине I2C, которая обычно используется для связи между отдельными интегральными микросхемами, расположенными на одной печатной плате. Два других распространенных протокола, которые также входят в эту основную категорию – это UART (универсальный асинхронный приемник/передатчик) и SPI (последовательный периферийный интерфейс). Вам необходимо знать основные характеристики I2C, прежде чем вы сможете полностью понять сравнение этих трех интерфейсов, поэтому обсудим эту тему в конце статьи.
Много названий, а шина одна
Дополнительная путаница вносится, когда вы замечаете, что SMB или SMBus явно используется в качестве еще одного способа обращения к шине I2C. Фактически эти сокращения относятся к шине управления системой SMB (System Management Bus), которая отличается, хотя и почти идентична, от шины I2C. Оригинальный протокол I2C был разработан компанией Phillips Semiconductor, а спустя годы Intel определил протокол SMBus как расширение I2C. Эти две шины в значительной степени взаимозаменяемы; если вас интересуют незначительные отличия между ними, то смотрите страницу 57 спецификации шины управления системой SMB.
Выглядит, как попытка обсудить что-то важное в комнате, полной людей.
Чтобы оценить ловкие технические приемы, которые делают I2C настолько эффективной, вам нужно подумать о трудностях достижения надежной, но универсальной связи между несколькими независимыми компонентами. Ситуация достаточно проста, если у вас есть одна микросхема, которая всегда является ведущей (master), и одна микросхема, которая всегда является ведомой (slave). Но что, если у вас есть несколько ведомых? Что если ведомые не знают, кто ведущий? Что, если у вас есть несколько ведущих? Что произойдет, если ведущий запросит данные у ведомого устройства, которое по какой-то причине перестало функционировать? Или что, если ведомый перестал функционировать в середине передачи? Что делать, если ведущий утверждает, что шина осуществляет передачу, а затем он выйдет из строя, прежде чем освободить шину?
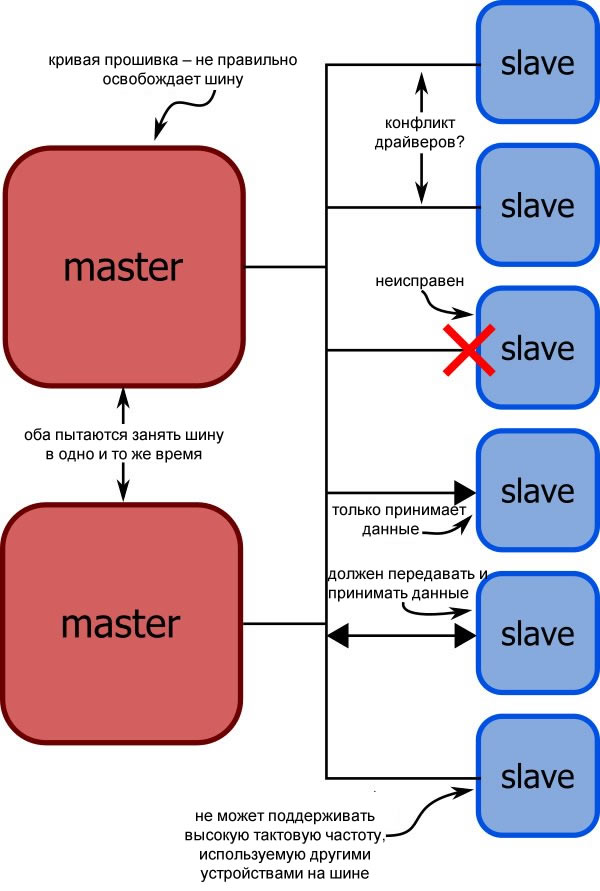 Возможные проблемы на шине
Возможные проблемы на шине
Дело в том, что в системе связи такого типа есть много вещей, которые могут пойти не так. Вы должны помнить об этом, когда будете изучать I2C, потому что в противном случае этот протокол будет казаться невыносимо сложным и перегруженным. Дело в том, что эта дополнительная сложность – это то, что позволяет I2C обеспечивать гибкую, расширяемую, надежную и низкоуровневую последовательную связь.
Обзор
Прежде чем вдаваться в детали, давайте рассмотрим ключевые характеристики I2C:
I2C против UART и SPI
Преимущества I2C можно резюмировать следующим образом:
А вот некоторые недостатки:
С этих точек зрения видно, что I2C особенно подходит, когда у вас сложная, разнообразная или обширная сеть связанных устройств. Интерфейсы UART обычно используются для соединений «точка-точка», потому что не имеют стандартного способа адресации различных устройств и совместного использования линий связи. SPI отлично работает, когда у вас есть одно ведущее и несколько ведомых устройств, но для каждого ведомого устройства требуется отдельный сигнал выбора ведомого, что приводит к большому количеству линий связи и к трудностям разводки печатной платы, когда на шине находится много устройств. И SPI неудобен, когда вам нужно поддерживать несколько ведущих устройств.
Возможно, вам придется сознательно избегать I2C, если пропускная способность является приоритетом; SPI поддерживает более высокие частоты тактового сигнала и минимизирует накладные расходы. Кроме того, разработка низкоуровнего аппаратного обеспечения для SPI (или UART) намного проще, поэтому, если вы работаете с FPGA и разрабатываете свой последовательный интерфейс с нуля, I2C, вероятно, стоит выбирать последним.
Заключение
Мы рассмотрели основные характеристики I2C, и теперь мы достаточно хорошо знаем о преимуществах и недостатках этого протокола, чтобы принять обоснованное решение о том, какую последовательную шину выбрать для какого-то конкретного приложения. В будущих статьях мы рассмотрим протокол и как его реализовать более подробно.



