Что такое Headless mode
Последнее время функцию Headless mode (или безголовый режим) стали добавлять во все бюджетные квадрокоптеры. Несмотря на то, что наличие этой функции помогает новичкам в полете, не всем понятно, как она работает.
Прежде чем кинуться в разъяснения мы расскажем, как дрон работает в обычных условиях.
Как и любое летательное средство квадрокоптер имеет переднюю и заднюю часть, хотя для квадрокоптеров это не всегда очевидно по причине симметрии. Если ваш коптер имеет явно выраженную симметрию, бывает проблематично определить какой стороной он к вам повернут, особенно, если дрон находится от вас на некотором удалении.
Чтобы решить эту проблему многие производители оснащают свои модели навигационными светодиодными огнями. Обычно эти огни расположены на лучах с нижней стороны. Спереди располагаются красные, сзади – зеленые огни. Но как только дрон отдалится от вас на приличное расстояние – эти огни становятся также не видны, особенно при дневном свете.

Управление дроном
За поведение квадрокоптера в воздухе отвечает микроконтроллер, одной из функций которого является определение дрона в пространстве. Другими словами, контроллер понимает где у модели перед, а где зад.
Если квадрокоптер повернут к вам задней частью, управление понятное и логичное, стик от тебя – дрон летит вперед (от вас), на себя – назад (на вас), влево –летит влево, вправо – летит вправо.
Совсем другое дело, когда коптер повернут к вам передом. В этом случае все наоборот стик от тебя – дрон летит назад (на вас), на себя – летит вперед (от вас), влево – летит вправо, вправо –летит влево.
Именно поэтому поначалу управление квадрокоптером кажется сложным. Для того чтобы упростить жизнь начинающим пилотам, был придуман режим Headless (HeadFree) mode или безголовый режим.
HeadFree обычно используется в контроллерах multiwii или Naze 32
Режим Headless mode
Говоря простым языком в этом режиме вам не нужно заботиться об ориентации коптера.
Активировав режим Headless Mode – дрон всегда будет лететь вперед при нажатии стика от себя, неважно какой стороной он к вам повернут передней или задней.
На картинке красной стрелкой показан перед коптера.
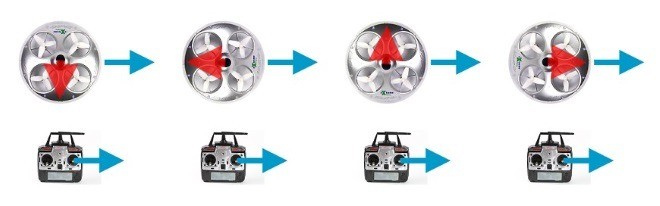
Единственным условием является требование предварительно установить коптер таким образом, чтобы его перед совпадал с направлением полета от вас.
Каким образом активируется этот режим описано в инструкции к каждой конкретной модели (обычно это переключатель на пульте).
Если вы планируете развивать свои навыки в пилотировании дронов, вам рано или поздно придется отказаться от этого режима, поскольку он несколько ограничивает контроль над моделью. Так что рекомендуем тренировать навыки без использования Headless mode. В этом вам помогут авиасимуляторы.
Режим Headless (mode) что это и как работает
Режим Headless (Headless mode) это специальная функция, которая есть почти на всех квадрокоптерах начального уровня. Функция позволяет не следить за ориентацией квадрокоптера в воздухе и поэтому, значительно упрощает процесс управления в прямой видимости. Это очень актуальная функция для неопытного пилота.
Headless mode, что это? Рассмотрим подробнее
Функция помогает новичкам не растеряться в полете, у которых главная проблема — это большая сложность определить, где у квадрокоптера перед, а где зад и правильно вести его в воздухе. Именно невозможность определить, где именно перед квадрокоптера, создает большие проблемы с тем, что начинающий пилот неправильно управляет дроном и он начинает лететь совсем не туда, куда по задумке хочет полететь пилот. Простыми словами, пилот поворачивает стик на пульте вправо, а квадрокоптер летит влево, так еще и не от пилота, а к пилоту — вот это и есть главная проблема.
Headless mode (режим) — переводится как «без головы» или безголовый режим. Это режим, благодаря которому новички могут без проблем управлять квадрокоптером в любом направлении, потому что функция будет контролировать текущее положение квадрокоптера относительно пульта управления.
Простыми словами, неважно, куда направлен перед квадрокоптера, поэтому, наклоняя стик на пульте для наклона квадрокоптера вправо — дрон наклонится или повернет вправо. Квадрокоптер в «безголовом режиме» (Headless mode) будет поворачивать относительно вашей текущей позиции, а не своей, но не будет этого делать, когда режим отключен и в таком случае, если дрон будет лететь передней частью к вам навстречу, а вы наклоните стик вправо, то дрон повернет влево.
Ниже мы сделали наглядную иллюстрацию, как себя будет вести квадрокоптер в режиме Headless и без него, так вам проще понять, что режим Headless:
Как включить Headless Mode?
У каждого производителя квадрокоптера эта функция включается по своему, поэтому здесь нет универсального ответа. Но обычно, достаточно нажать всего 1 кнопку, чтобы включился этот режим. Иногда бывает, что функция нельзя включить просто нажав кнопку и если вы уже испробовали все кнопки, то попробуйте нажать и удерживать кнопку. Если опять не получилось, что ж, придется читать инструкцию к вашему квадрокоптеру! Уверены, там вы найдете способ включить Headless Mode.
У каких квадрокоптеров есть Headless Mode?
Режим Headless есть практически у всех бюджетных квадрокоптеров, ведь это очень важная функция, особенно для новичка. Поэтому, производители внедряют безголовый режим даже в самые дешевые квадрокоптеры.
У нас есть подборка недорогих и бюджетных квадрокоптеров, там есть довольно дешевые за 100$, которые летают на расстояние 50-300 метров и у которых есть headless mode. Также, они летают от 5 минут самые простые и до 25 минут самые дорогие из подборки. Ссылка в зеленом блоке:
Преимущества безголового режима
Несомненно, этот режим имеет ряд преимуществ над обычным управлением, но в первую очередь он направлен на новичков, которая лишь учатся управлять и не освоили управление должным образом, чтобы легко управлять квадрокоптером, даже если он летит в сторону пилота. Если же вы уже умеете выполнять трюки и спокойно управлять дроном летя к себе, то не советуем использовать этот режим.
Можно выделить несколько главных преимуществ этого режима:
Легкость обучения
Когда только новоиспеченный пилот квадрокоптера взял в руки пульт управления, он еще толком не понимает физику управления, а тут еще нужно и следить за ориентацией, чтобы не улететь в другую сторону. Включенный режим Headless поможет освоить азы управления и понять физику полета квадрокоптера.
Полета без стресса и разбитых дронов
Нет необходимости следить за всеми параметрами полета, особенно за ориентаций квадрокоптера в пространстве, а ведь это занимает очень много усилий — нужно каждый раз сначала подумать, куда полетит дрон, если наклонить стик в эту сторону. А вдруг впереди дерево или препятствие? Новичок обычно теряется и дрон влетает в дерево или стену, потому что начинающий пилот не успел сориентироваться. А так, с высокой вероятностью, пилот успеет увести квадрокоптер от препятствия, не обращая внимания на ориентацию.
Интуитивно понятное управление
Без необходимости держать на контроле ориентацию квадрокоптера, вы можете просто летать, управляя дроном пультом. Ничего специального знать не нужно, в этом и есть плюс — интуитивно понятное управление.
Нужно ли новичкам летать в режиме Headless mode?
Для понимания физики и азов управления — безусловно нужно использовать эту функцию. Но старайтесь выйти из этого режима как можно раньше. Опытные пилоты всегда советуют не использовать режим Headless новичкам по нескольким причинам.
Одна из них, невозможность фактически понять полное управление квадрокоптером, так как пилотирование происходит почти полностью в автоматическом режиме и пилоту почти ничего не нужно делать.
Вторая причина — это невозможность снимать красивые видео, летая только в этом режиме, так как будет сильное ограничение в движении (в поворотах), камера всегда будет в одном направлении.
Режим нужен только для начинающих, которые только начали учиться и планируют профессионально снимать видео на камеру. В этом случае, либо вообще не переходите в этом режим, либо как можно скорее перестаньте использовать его. Еще можно включать, например, когда вы не можете сориентировать квадрокоптер в пространстве, тут конечно же, эта функция поможет — включили, вернули дрон и выключили.

Я не приветствую долгое использование режима Headless, даже против долго использования. Только новичкам в первые полеты.
Этот режим учит неправильному управлению квадрокоптером, а также создает проблемы для перехода на обычное управление.
Надежность режима и недостатки
У этого режима есть и недостатки в надежности. Рассмотрим главное.
Отвечает за эту функцию магнитометр и ориентируется он тоже по магнитному полю. Поэтому, если вы будете лететь вдоль источника магнитного поля, например, вдоль или над/под высоковольтными проводами, то магнитное поле создаваемое проводами, создаст нарушения в работе датчика магнитометра в квадрокоптере и тут уже как повезет, но скорее всего, дрон потеряет направление.
Недостатком будет то, что вы разучитесь нормальному управлению квадрокоптером, особенно, если купите себе более дорогой дрон. В серьезных квадрокоптерах эта функция отсутствует за ненадобностью и вот тут то вам придется учиться нормальному управлению.
RCDetails Blog
О коптерах и не только
Первоначальная настройка режимов в Betaflight

В этом руководстве мы расскажем про различные полетные режимы в Betaflight и покажем, как их настроить. Этот процесс не зависит от того, какой коптер, полетный контроллер и какой пульт управления вы используете.
Не все «режимы» являются полетными режимами на вкладке «Modes» в Betaflight Configurator, некоторые режимы просто активируют какие-либо функции. Ниже я объясню подробнее.
Содержание
Режимы в Betaflight
Чтобы взлететь, нужно активировать коптер (армить, заармить). Армим коптер и видим, что моторы начинают вращаться. Если параметр «MOTOR STOP» отключен, тогда моторы не начнут вращаться пока вы не дадите газу.
Армить коптер можно жестом стиками: газ минимум, рысканье вправо; либо настроить тумблер. Лучше конечно использовать тумблер (подробнее объясню в другой статье). Учтите, что при арминге тумблером, арминг стиками отключается.
Если арминг не работает, то читайте статью, в которой описаны основные проблемы и их решения (англ).
Angle, Horizon, Acro Modes
При отпускании стиков в режимах Angle и Horizon коптер будет автоматически выравниваться, используя как гироскопы, так и акселерометры. Новичкам в этих режимах летать проще. В режиме Horizon можно делать флипы и ролы, а в режиме Angle — нельзя, тут углы ограничены в 45 градусов (настраивается).
В любом случае, Acro — это самый главный полетный режим для фристайла и гонок. Новичкам я настоятельно рекомендую начать его использовать как можно раньше.
Что такое режим Acro?
Возможно вы уже заметили, что режима Acro нет на закладке Modes. Это потому, что Acro режим автоматически включается, когда вы армите коптер. Однако, он может быть переопределен другим режимом, например, Horizon или Angle, когда они активируются.
Исчезли режимы Angle и Horizon
Если режимы Angle и Horizon недоступны на вкладке Modes, это значит, что в Betaflight отключен акселерометр. Некоторые отключают аксели, т.к. летают только в акро- режиме, а отключение акселерометров освобождает процессор от некоторых ненужных задач. Вы можете включить акселерометры на вкладке Configuration.
Beeper
Щелкаем тумблером на аппе и пищалка начнет издавать звук (если она конечно установлена). Это поможет вам найти упавший дрон. Кроме пищалки можно настроить регули, чтобы они издавали писк двигателями (функция ESC beacon), это независимая от пищалки функция, пригодится как запасной вариант, на случай отказа пищалки.
Airmode
Airmode — это не полетный режим, это функция, которая улучшает управляемость коптера при нулевом газе. Но её использование может привести к неожиданным ускорениям моторов, когда коптер стоит на земле, так что будьте осторожны.
Этот режим действительно доступен ещё и как фича/функция, так что если её включить на вкладке Configuration, то она исчезнет со вкладки Modes. Преимущество использования вкладки Modes в том, что вы сможете включить/выключить Airmode прямо в полете.
Anti-Gravity
Антигравитация — это не полетный режим, это фича. Её активация уменьшает «провалы» при резком изменении газа, путем увеличения I-коэффициента ПИД регулятора.
То же что и в случае с Airmode, если вы включили её на вкладке Configuration, то она исчезнет на вкладке Modes.
Blackbox Start/Erase
В принципе название говорит само за себя — начало и остановка записи логов в черный ящик (Blackbox).
Camera Control
Не часто используется, обновлю информацию позже.
OSD Disable SW
Отключает Betaflight OSD, т.е. текст пропадает с экрана.
Prearm
При использовании тумблера для арминга можно случайно им щелкнуть и запустить моторы, а это может быть опасно. Pre-Arm — это еще один дополнительный шаг для арминга.
Можно настроить этот режим на ещё один тумблер, и тогда вы сможете заармить коптер, только если и этот выключатель включен. После арминга тумблер можно отщелкнуть, т.е. тумблер без фиксации отлично подойдет.
Flip Over After Crash
Если после падения коптер лежит вверх ногами, то можно использовать этот режим чтобы «перевернуть» коптер и, возможно, заново взлететь. Переворот выполняется за счет вращения моторов с одной стороны в обратном направлении, и для этого требуется использование протокола DShot.
Также известен как Turtle Mode — режим черепахи.
VTX Pit Mode
Если есть SmartAudio или Tramp Telemetry, то активирует PitMode видеопередатчика. Pitmode — это режим в котором мощность видеопередатчика близка к 0. Полезно в случае аварии, так вы минимизируете шанс помешать другим пилотам.
Failsafe
Ручная активация фэйлсейва (англ), без необходимости ждать пока пропадет связь.
Как настроить режимы в Betaflight?
Настраиваем тумблеры в пульте
Режимы Betaflight можно активировать тумблерами на аппаратуре управления.
Вот руководство по настройке тумблеров в OpenTx (подойдет для Taranis X9D, QX7, Horus X10, Nirvana, X-Lite и т.д.). Если у вас другая аппаратура — придется погуглить руководство, их много.
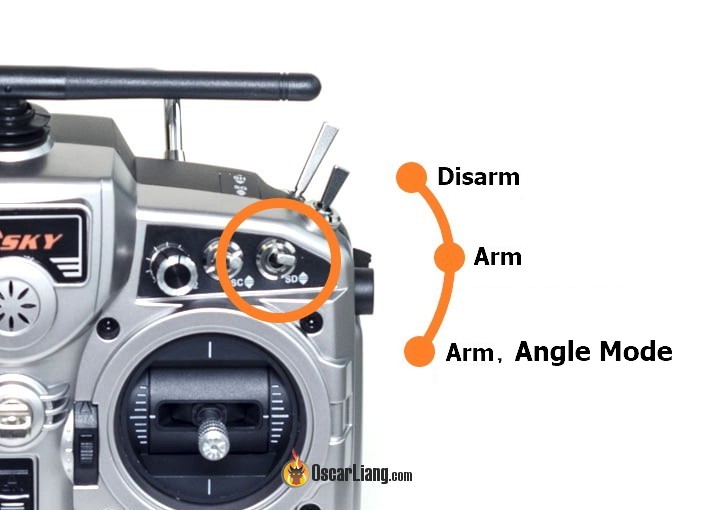
В этом примере я буду использовать тумблер SD на канале AUX1 (канал 5), а SG на AUX2 (канал 6).
На Таранисе я предпочитаю использовать тумблер SD для арминга, а SG для пищалки. Ниже я покажу вам, как включить режим Angle с того же переключателя (SD), что и активирую коптер:
Настраиваем режимы в Betaflight
Настройка тумблеров — это была самая сложная часть, теперь осталось самое легкое.
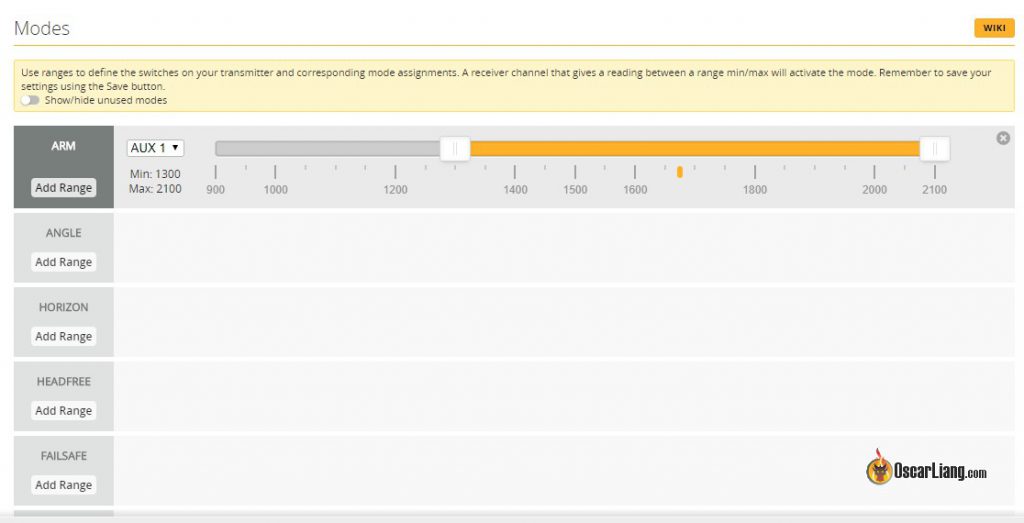
Переходим на вкладку Modes в Betaflight Configurator.
![]()
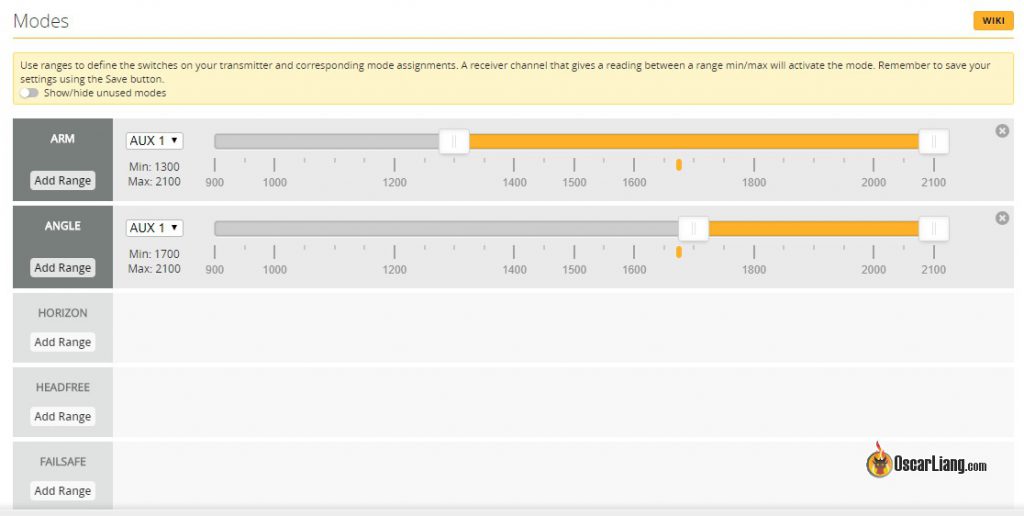
Начнем с первого и самого важного — арминг (Arm). Нажимаем «Add Range» и выбираем AUX1 в выпадающем списке.
Нужно выбрать диапазон значений канала, при котором этот режим будет активен. Для двухпозиционного выключателя это 1500 — 2000. Для трехпозиционного я ставлю 1300 — 2000, так что в среднем и нижнем положениях коптер будет заармлен, как и показано на рисунке.
Для того, чтобы активировать Angle тем же тумблером, но в нижнем положении, нужно сделать так, как показано ниже:
Ну и в конце, настраиваем пищалку (beeper) на тумблер SG, который привязан к каналу AUX2.

Нажимаем «Save», на этом всё!
Нужна помощь?
Если есть вопросы обращайтесь, вот тут (англ.) сотни пилотов, которые готовы помочь советом.
Headfree betaflight что это
There are various modes that can be toggled on or off. Modes can be enabled/disabled by stick positions, auxillary receiver channels and other events such as failsafe detection.
The default flight mode does not stabilize the multicopter around the roll and the pitch axes. That is, the multicopter does not level on its own if you center the pitch and roll sticks on the radio. Rather, they work just like the yaw axis: the rate of rotation of each axis is controlled directly by the related stick on the radio, and by leaving them centered the flight controller will just try to keep the multicopter in whatever orientation it’s in. This default mode is called «Rate» mode, also sometime called «Acro» (from «acrobatic») or «Manual» mode, and is active whenever no auto-leveled mode is enabled.
If your flight controller is equipped with a 3 axis accelerometer (very likely), then you can enable one of the two available auto leveled flight modes.
In this auto-leveled mode the roll and pitch channels control the angle between the relevant axis and the vertical, achieving leveled flight just by leaving the sticks centered.
This hybrid mode works exactly like the previous ANGLE mode with centered roll and pitch sticks (thus enabling auto-leveled flight), then gradually behaves more and more like the default RATE mode as the sticks are moved away from the center position.
In this mode, the «head» of the multicopter is always pointing to the same direction as when the feature was activated. This means that when the multicopter rotates around the Z axis (yaw), the controls will always respond according the same «head» direction.
With this mode it is easier to control the multicopter, even fly it with the physical head towards you since the controls always respond the same. This is a friendly mode to new users of multicopters and can prevent losing the control when you don’t know the head direction.
Spare auxillary receiver channels can be used to enable/disable modes. Some modes can only be enabled this way.
Configure your transmitter so that switches or dials (potentiometers) send channel data on channels 5 and upwards (the first 4 channels are usually occupied by the throttle, aileron, rudder, and elevator channels).
e.g. You can configure a 3 position switch to send 1000 when the switch is low, 1500 when the switch is in the middle and 2000 when the switch is high.
Configure your tx/rx channel limits to use values between 1000 and 2000. The range used by mode ranges is fixed to 900 to 2100.
When a channel is within a specifed range the corresponding mode is enabled.
Use the GUI configuration tool to allow easy configuration when channel.
There is a CLI command, aux that allows auxillary configuration. It takes 5 arguments as follows:
If the low and high position are the same then the values are ignored.
Configure AUX range slot 0 to enable ARM when AUX1 is withing 1700 and 2100.
You can display the AUX configuration by using the aux command with no arguments.
Что такое Headless mode или безголовый режим?
Введение
Часто приходится наблюдать запуски различных квадрокоптеров, либо других БПЛА в безголовом режиме (Headless mode). Принято считать, что он существенно облегчает как сам полёт, так и управление дроном в целом, но тем не менее, для многих присутствие этого режима не совсем понятно.
Появлению режима «Headless» мы обязаны китайским производителям не дорогих беспилотников. Именно на квадах бюджетного сегмента чаще всего можно встретить этот режим, с целью облегчить новичкам их первый полёт. И прежде чем начать объяснять, что такое «Headless» режим, давайте сначала поговорим о том, как реализуется управление квадрокоптером (дроном) на базовом уровне.

Как и любое транспортное средство, дрон имеет перед и зад, но чаще всего из-за симметричного дизайна, отличить в полёте переднюю часть дрона от задней сложно. Чтобы отчасти решить эту проблему, производители БПЛА стали устанавливать на дрон несущие винты различные по цвету. Например, винты красного цвета на моторы передних лучей, а чёрные на моторы задних.

Но опять же, как только дрон поднимется в воздух и отлетит на расстояние, различить эти цвета становится невозможно, что опять ставит проблему ориентации под вопрос. Производители пошли дальше и стали оснащать свои продукты светодиодной подсветкой, но и её эффективность сводится к нулю при дневном солнечном свете.
Как работает ориентация дрона в обычном режиме?
Благодаря микроконтроллеру установленному в дрон, он всегда понимает, где у него перед, а где зад. И такой факт является основополагающим для всех БПЛА.
В обычном режиме (когда дрон находится задом к пилоту) пока квад летит прямо все понятно, переводим правый стик влево — дрон летит влево, в право — дрон летит вправо, вперед — дрон летит вперед, и на себя — дрон летит назад (задом).
Но стоит только развернуть дрон на 180º (передом к пилоту), чтобы вернуться например в место взлёта, то, переместив стик влево — дрон повернет вправо, в право — дрон повернет влево, вперед — дрон полетит к пилоту, а если отклонить стик на себя, то дрон будет отдаляться от пилота. Новичка такое положение дел введет в заблуждение. И вот тогда на помощь приходит безголовый режим (Headless mode).
Что такое Headless mode?

Проще говоря, Headless mode позволяет начинающим пилотам не беспокоиться об ориентации в целом. Принцип работы безголового режима довольно прост, единственным предварительным условием является то, что перед активацией и взлётом, пользователь должен установить дрон, так, чтобы перед дрона совпадал с предстоящим направлением полёта. Активируется режим у каждой модели БПЛА по своему, описание процесса находится в инструкции идущей с изделием.
Активируя «Headless mode» для дрона становится не важно, где у него перед на момент полёта, а где зад. Он будет подчиняться строго положению правого стика, т.е. стик вперед — летим вперед, стик назад — летим назад, и не важно, что пилот развернул дрон на 180º. Таким образом на начальном этапе обучения новичок сможет сконцентрироваться исключительно на адаптации к управлению беспилотником.
В последующем от этого режима рекомендуется отказаться, так как в профессиональной практике он не применяется. И вы не встретите его у дронов PRO уровня.
Так же стоит учесть, что как показывает практика, корректно работающих безголовых режимов очень мало, что может усложнить как процесс обучения, так и сам полёт. Поэтому будет лучшим сразу отказаться от полётов в «Headless mode» и приступать к обучению в обычном режиме ориентации.



