BetaFlight
Содержание
Описание [править]



Прошивка BetaFlight очень динамично развивается и некоторые её «фичи» потом переходят в «родительский» CleanFlight (например, полётный режим AIR MODE). Обратной стороной этого преимущества является то, что релизы выходят достаточно часто, а стабильность их не всегда высока.
BetaFlight 2.1.6 от 20 декабря 2015: режим AIR MODE просто бесподобен. Субъективно, разница в управлении, практически сравнима, с отличием управляемости регуляторов в режиме торможения (Damping Light) и без. [1]
BetaFlight v2 1.11.0. Убран AUTOTUNE, но добавлен GTUNE, отличие которого в следующем: коптер не делает колебаний туда сюда при настройке с риском падения, а просто во время полёта когда один из стиков в нейтрали по какой-то оси, GTUNE смотрит на колебания по этой оси и подгоняет PIDы. GTUNE не работает на CC3D.
Полезное [править]
Команды CLI [править]
FAQ [править]
Как сохранить все настройки в файл [править]
Можно ВСЕ настройки сохранить в конфиг-файл, чтобы по-быстрому накатить их при необходимости.
Более того, при установке новой версии прошивки (Cleanflight или Betaflight), настройки всегда лучше затирать (FULL CHIP ERASE) и потом накатывать по новой.
Если используется только один профиль, то достаточно в терминалке (вкладка CLI) выполнить команду:
Чтобы сохранить данные из всех профилей, следует использовать такую последовательность команд:
После этого следует скопировать полученный список команд в текстовый файл и сохранить у себя на компьютере.
Dzen1
Modes полётные режимы справка.
Оценить эту запись
При отпускании стиков в режимах Angle и Horizon коптер будет автоматически выравниваться, используя как гироскопы, так и акселерометры. Новичкам в этих режимах летать проще. В режиме Horizon можно делать флипы и ролы, а в режиме Angle — нельзя, тут углы ограничены в 45 градусов (настраивается).
В любом случае, Acro — это самый главный полетный режим для фристайла и гонок. Новичкам я настоятельно рекомендую начать его использовать как можно раньше.
Вот статья с описанием различий этих режимов, и объяснение, почему стоит использовать Acro режим (англ).
Что такое режим Acro?
Возможно вы уже заметили, что режима Acro нет на закладке Modes. Это потому, что Acro режим автоматически включается, когда вы армите коптер. Однако, он может быть переопределен другим режимом, например, Horizon или Angle, когда они активируются.
Исчезли режимы Angle и Horizon
Если режимы Angle и Horizon недоступны на вкладке Modes, это значит, что в Betaflight отключен акселерометр. Некоторые отключают аксели, т.к. летают только в акро- режиме, а отключение акселерометров освобождает процессор от некоторых ненужных задач. Вы можете включить акселерометры на вкладке Configuration.
Щелкаем тумблером на аппе и пищалканачнет издавать звук (если она конечно установлена). Это поможет вам найти упавший дрон. Кроме пищалки можно настроить регули, чтобы они издавали писк двигателями (функция ESC beacon), это независимая от пищалки функция, пригодится как запасной вариант, на случай отказа пищалки.
Airmode — это не полетный режим, это функция, которая улучшает управляемость коптера при нулевом газе. Но её использование может привести к неожиданным ускорениям моторов, когда коптер стоит на земле, так что будьте осторожны.
Этот режим действительно доступен ещё и как фича/функция, так что если её включить на вкладке Configuration, то она исчезнет со вкладки Modes. Преимущество использования вкладки Modes в том, что вы сможете включить/выключить Airmode прямо в полете.
Антигравитация — это не полетный режим, это фича. Её активация уменьшает «провалы» при резком изменении газа, путем увеличения I-коэффициента ПИД регулятора.
То же что и в случае с Airmode, если вы включили её на вкладке Configuration, то она исчезнет на вкладке Modes.
В принципе название говорит само за себя — начало и остановка записи логов в черный ящик (Blackbox).
Не часто используется, обновлю информацию позже.
Отключает Betaflight OSD, т.е. текст пропадает с экрана.
При использовании тумблера для арминга можно случайно им щелкнуть и запустить моторы, а это может быть опасно. Pre-Arm — это еще один дополнительный шаг для арминга.
Можно настроить этот режим на ещё один тумблер, и тогда вы сможете заармить коптер, только если и этот выключатель включен. После арминга тумблер можно отщелкнуть, т.е. тумблер без фиксации отлично подойдет.
Flip Over After Crash
Если после падения коптер лежит вверх ногами, то можно использовать этот режим чтобы «перевернуть» коптер и, возможно, заново взлететь. Переворот выполняется за счет вращения моторов с одной стороны в обратном направлении, и для этого требуется использование протокола DShot.
Также известен как Turtle Mode — режим черепахи.
Если есть SmartAudio или Tramp Telemetry, то активирует PitMode видеопередатчика. Pitmode — это режим в котором мощность видеопередатчика близка к 0. Полезно в случае аварии, так вы минимизируете шанс помешать другим пилотам.
Ручная активация фэйлсейва (англ), без необходимости ждать пока пропадет связь
Обновлено 02.05.2019 в 13:29 [ARG:5 UNDEFINED]
RCDetails Blog
О коптерах и не только
Первоначальная настройка режимов в Betaflight

В этом руководстве мы расскажем про различные полетные режимы в Betaflight и покажем, как их настроить. Этот процесс не зависит от того, какой коптер, полетный контроллер и какой пульт управления вы используете.
Не все «режимы» являются полетными режимами на вкладке «Modes» в Betaflight Configurator, некоторые режимы просто активируют какие-либо функции. Ниже я объясню подробнее.
Содержание
Режимы в Betaflight
Чтобы взлететь, нужно активировать коптер (армить, заармить). Армим коптер и видим, что моторы начинают вращаться. Если параметр «MOTOR STOP» отключен, тогда моторы не начнут вращаться пока вы не дадите газу.
Армить коптер можно жестом стиками: газ минимум, рысканье вправо; либо настроить тумблер. Лучше конечно использовать тумблер (подробнее объясню в другой статье). Учтите, что при арминге тумблером, арминг стиками отключается.
Если арминг не работает, то читайте статью, в которой описаны основные проблемы и их решения (англ).
Angle, Horizon, Acro Modes
При отпускании стиков в режимах Angle и Horizon коптер будет автоматически выравниваться, используя как гироскопы, так и акселерометры. Новичкам в этих режимах летать проще. В режиме Horizon можно делать флипы и ролы, а в режиме Angle — нельзя, тут углы ограничены в 45 градусов (настраивается).
В любом случае, Acro — это самый главный полетный режим для фристайла и гонок. Новичкам я настоятельно рекомендую начать его использовать как можно раньше.
Что такое режим Acro?
Возможно вы уже заметили, что режима Acro нет на закладке Modes. Это потому, что Acro режим автоматически включается, когда вы армите коптер. Однако, он может быть переопределен другим режимом, например, Horizon или Angle, когда они активируются.
Исчезли режимы Angle и Horizon
Если режимы Angle и Horizon недоступны на вкладке Modes, это значит, что в Betaflight отключен акселерометр. Некоторые отключают аксели, т.к. летают только в акро- режиме, а отключение акселерометров освобождает процессор от некоторых ненужных задач. Вы можете включить акселерометры на вкладке Configuration.
Beeper
Щелкаем тумблером на аппе и пищалка начнет издавать звук (если она конечно установлена). Это поможет вам найти упавший дрон. Кроме пищалки можно настроить регули, чтобы они издавали писк двигателями (функция ESC beacon), это независимая от пищалки функция, пригодится как запасной вариант, на случай отказа пищалки.
Airmode
Airmode — это не полетный режим, это функция, которая улучшает управляемость коптера при нулевом газе. Но её использование может привести к неожиданным ускорениям моторов, когда коптер стоит на земле, так что будьте осторожны.
Этот режим действительно доступен ещё и как фича/функция, так что если её включить на вкладке Configuration, то она исчезнет со вкладки Modes. Преимущество использования вкладки Modes в том, что вы сможете включить/выключить Airmode прямо в полете.
Anti-Gravity
Антигравитация — это не полетный режим, это фича. Её активация уменьшает «провалы» при резком изменении газа, путем увеличения I-коэффициента ПИД регулятора.
То же что и в случае с Airmode, если вы включили её на вкладке Configuration, то она исчезнет на вкладке Modes.
Blackbox Start/Erase
В принципе название говорит само за себя — начало и остановка записи логов в черный ящик (Blackbox).
Camera Control
Не часто используется, обновлю информацию позже.
OSD Disable SW
Отключает Betaflight OSD, т.е. текст пропадает с экрана.
Prearm
При использовании тумблера для арминга можно случайно им щелкнуть и запустить моторы, а это может быть опасно. Pre-Arm — это еще один дополнительный шаг для арминга.
Можно настроить этот режим на ещё один тумблер, и тогда вы сможете заармить коптер, только если и этот выключатель включен. После арминга тумблер можно отщелкнуть, т.е. тумблер без фиксации отлично подойдет.
Flip Over After Crash
Если после падения коптер лежит вверх ногами, то можно использовать этот режим чтобы «перевернуть» коптер и, возможно, заново взлететь. Переворот выполняется за счет вращения моторов с одной стороны в обратном направлении, и для этого требуется использование протокола DShot.
Также известен как Turtle Mode — режим черепахи.
VTX Pit Mode
Если есть SmartAudio или Tramp Telemetry, то активирует PitMode видеопередатчика. Pitmode — это режим в котором мощность видеопередатчика близка к 0. Полезно в случае аварии, так вы минимизируете шанс помешать другим пилотам.
Failsafe
Ручная активация фэйлсейва (англ), без необходимости ждать пока пропадет связь.
Как настроить режимы в Betaflight?
Настраиваем тумблеры в пульте
Режимы Betaflight можно активировать тумблерами на аппаратуре управления.
Вот руководство по настройке тумблеров в OpenTx (подойдет для Taranis X9D, QX7, Horus X10, Nirvana, X-Lite и т.д.). Если у вас другая аппаратура — придется погуглить руководство, их много.
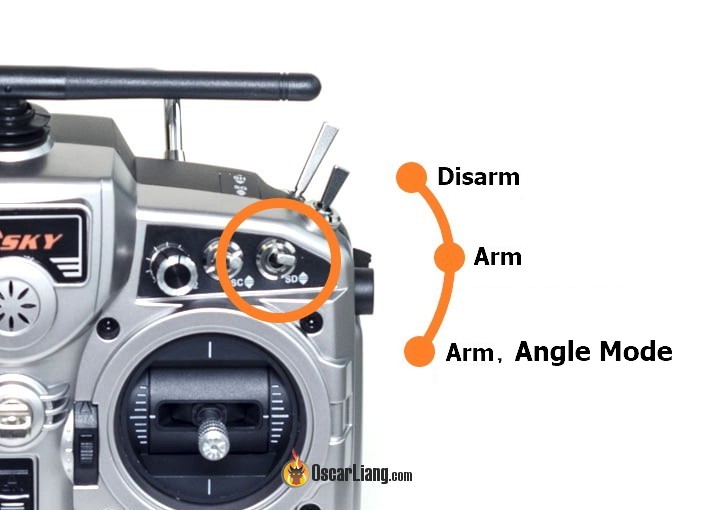
В этом примере я буду использовать тумблер SD на канале AUX1 (канал 5), а SG на AUX2 (канал 6).
На Таранисе я предпочитаю использовать тумблер SD для арминга, а SG для пищалки. Ниже я покажу вам, как включить режим Angle с того же переключателя (SD), что и активирую коптер:
Настраиваем режимы в Betaflight
Настройка тумблеров — это была самая сложная часть, теперь осталось самое легкое.
Переходим на вкладку Modes в Betaflight Configurator.
![]()
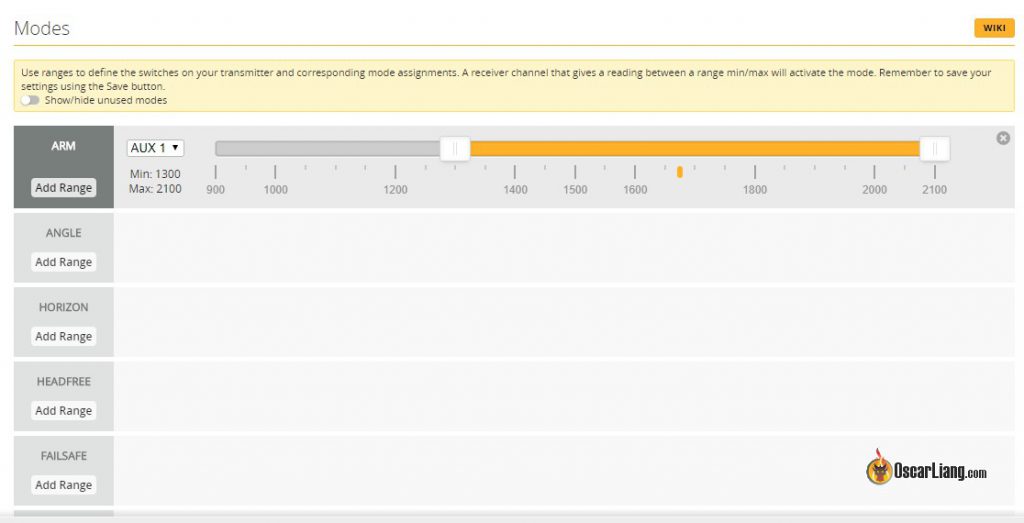
Начнем с первого и самого важного — арминг (Arm). Нажимаем «Add Range» и выбираем AUX1 в выпадающем списке.
Нужно выбрать диапазон значений канала, при котором этот режим будет активен. Для двухпозиционного выключателя это 1500 — 2000. Для трехпозиционного я ставлю 1300 — 2000, так что в среднем и нижнем положениях коптер будет заармлен, как и показано на рисунке.
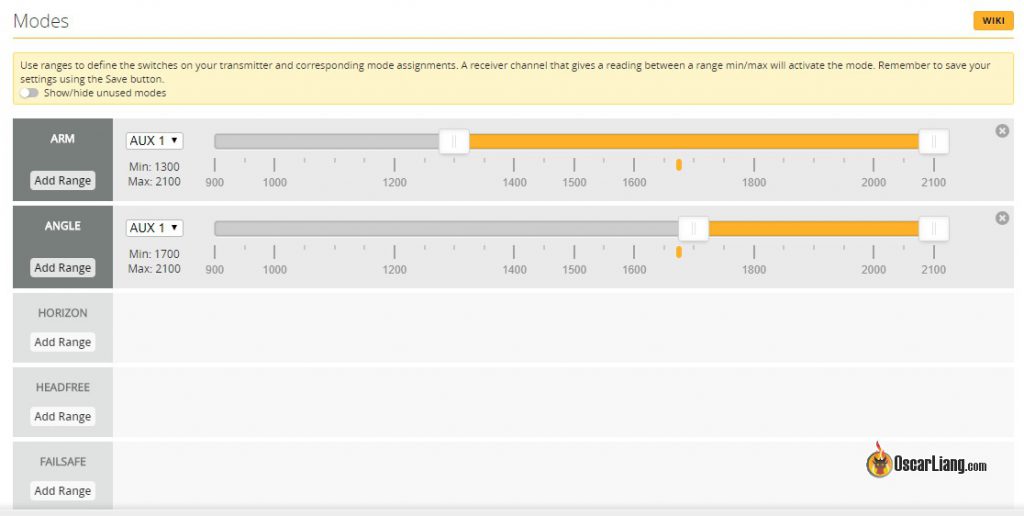
Для того, чтобы активировать Angle тем же тумблером, но в нижнем положении, нужно сделать так, как показано ниже:
Ну и в конце, настраиваем пищалку (beeper) на тумблер SG, который привязан к каналу AUX2.

Нажимаем «Save», на этом всё!
Нужна помощь?
Если есть вопросы обращайтесь, вот тут (англ.) сотни пилотов, которые готовы помочь советом.
RCDetails Blog
О коптерах и не только
Первоначальная настройка режимов в Betaflight

В этом руководстве мы расскажем про различные полетные режимы в Betaflight и покажем, как их настроить. Этот процесс не зависит от того, какой коптер, полетный контроллер и какой пульт управления вы используете.
Не все «режимы» являются полетными режимами на вкладке «Modes» в Betaflight Configurator, некоторые режимы просто активируют какие-либо функции. Ниже я объясню подробнее.
Содержание
Режимы в Betaflight
Чтобы взлететь, нужно активировать коптер (армить, заармить). Армим коптер и видим, что моторы начинают вращаться. Если параметр «MOTOR STOP» отключен, тогда моторы не начнут вращаться пока вы не дадите газу.
Армить коптер можно жестом стиками: газ минимум, рысканье вправо; либо настроить тумблер. Лучше конечно использовать тумблер (подробнее объясню в другой статье). Учтите, что при арминге тумблером, арминг стиками отключается.
Если арминг не работает, то читайте статью, в которой описаны основные проблемы и их решения (англ).
Angle, Horizon, Acro Modes
При отпускании стиков в режимах Angle и Horizon коптер будет автоматически выравниваться, используя как гироскопы, так и акселерометры. Новичкам в этих режимах летать проще. В режиме Horizon можно делать флипы и ролы, а в режиме Angle — нельзя, тут углы ограничены в 45 градусов (настраивается).
В любом случае, Acro — это самый главный полетный режим для фристайла и гонок. Новичкам я настоятельно рекомендую начать его использовать как можно раньше.
Что такое режим Acro?
Возможно вы уже заметили, что режима Acro нет на закладке Modes. Это потому, что Acro режим автоматически включается, когда вы армите коптер. Однако, он может быть переопределен другим режимом, например, Horizon или Angle, когда они активируются.
Исчезли режимы Angle и Horizon
Если режимы Angle и Horizon недоступны на вкладке Modes, это значит, что в Betaflight отключен акселерометр. Некоторые отключают аксели, т.к. летают только в акро- режиме, а отключение акселерометров освобождает процессор от некоторых ненужных задач. Вы можете включить акселерометры на вкладке Configuration.
Beeper
Щелкаем тумблером на аппе и пищалка начнет издавать звук (если она конечно установлена). Это поможет вам найти упавший дрон. Кроме пищалки можно настроить регули, чтобы они издавали писк двигателями (функция ESC beacon), это независимая от пищалки функция, пригодится как запасной вариант, на случай отказа пищалки.
Airmode
Airmode — это не полетный режим, это функция, которая улучшает управляемость коптера при нулевом газе. Но её использование может привести к неожиданным ускорениям моторов, когда коптер стоит на земле, так что будьте осторожны.
Этот режим действительно доступен ещё и как фича/функция, так что если её включить на вкладке Configuration, то она исчезнет со вкладки Modes. Преимущество использования вкладки Modes в том, что вы сможете включить/выключить Airmode прямо в полете.
Anti-Gravity
Антигравитация — это не полетный режим, это фича. Её активация уменьшает «провалы» при резком изменении газа, путем увеличения I-коэффициента ПИД регулятора.
То же что и в случае с Airmode, если вы включили её на вкладке Configuration, то она исчезнет на вкладке Modes.
Blackbox Start/Erase
В принципе название говорит само за себя — начало и остановка записи логов в черный ящик (Blackbox).
Camera Control
Не часто используется, обновлю информацию позже.
OSD Disable SW
Отключает Betaflight OSD, т.е. текст пропадает с экрана.
Prearm
При использовании тумблера для арминга можно случайно им щелкнуть и запустить моторы, а это может быть опасно. Pre-Arm — это еще один дополнительный шаг для арминга.
Можно настроить этот режим на ещё один тумблер, и тогда вы сможете заармить коптер, только если и этот выключатель включен. После арминга тумблер можно отщелкнуть, т.е. тумблер без фиксации отлично подойдет.
Flip Over After Crash
Если после падения коптер лежит вверх ногами, то можно использовать этот режим чтобы «перевернуть» коптер и, возможно, заново взлететь. Переворот выполняется за счет вращения моторов с одной стороны в обратном направлении, и для этого требуется использование протокола DShot.
Также известен как Turtle Mode — режим черепахи.
VTX Pit Mode
Если есть SmartAudio или Tramp Telemetry, то активирует PitMode видеопередатчика. Pitmode — это режим в котором мощность видеопередатчика близка к 0. Полезно в случае аварии, так вы минимизируете шанс помешать другим пилотам.
Failsafe
Ручная активация фэйлсейва (англ), без необходимости ждать пока пропадет связь.
Как настроить режимы в Betaflight?
Настраиваем тумблеры в пульте
Режимы Betaflight можно активировать тумблерами на аппаратуре управления.
Вот руководство по настройке тумблеров в OpenTx (подойдет для Taranis X9D, QX7, Horus X10, Nirvana, X-Lite и т.д.). Если у вас другая аппаратура — придется погуглить руководство, их много.
В этом примере я буду использовать тумблер SD на канале AUX1 (канал 5), а SG на AUX2 (канал 6).
На Таранисе я предпочитаю использовать тумблер SD для арминга, а SG для пищалки. Ниже я покажу вам, как включить режим Angle с того же переключателя (SD), что и активирую коптер:
Настраиваем режимы в Betaflight
Настройка тумблеров — это была самая сложная часть, теперь осталось самое легкое.
Переходим на вкладку Modes в Betaflight Configurator.
![]()
Начнем с первого и самого важного — арминг (Arm). Нажимаем «Add Range» и выбираем AUX1 в выпадающем списке.
Нужно выбрать диапазон значений канала, при котором этот режим будет активен. Для двухпозиционного выключателя это 1500 — 2000. Для трехпозиционного я ставлю 1300 — 2000, так что в среднем и нижнем положениях коптер будет заармлен, как и показано на рисунке.
Для того, чтобы активировать Angle тем же тумблером, но в нижнем положении, нужно сделать так, как показано ниже:
Ну и в конце, настраиваем пищалку (beeper) на тумблер SG, который привязан к каналу AUX2.
Нажимаем «Save», на этом всё!
Нужна помощь?
Если есть вопросы обращайтесь, вот тут (англ.) сотни пилотов, которые готовы помочь советом.
Betaflight configurator, настройка на русском
Betaflight configurator, настройка на русском. После сборки всех компонентов квадрокоптера, нужно прошить мозг (полетный контроллер) и регуляторы оборотов специальной программой — это Betaflight и BLHeli.
В этой же статье, мы будем рассматривать структуру конфигуратора Betaflight и то, что в нем можно настроить.
Прошить — это загрузить программное обеспечение в устройство. Без прошивки ваш дрон никуда не полетит. Трудность настройки в том, что у прошивки сотни различных настроек для всех типов полетов и под конкретные нужды.
Цель этой статьи — помочь начать с минимального набора функций, необходимых для начала полета. Если вы впервые сталкиваетесь с прошивкой квадрокоптера, то эта инструкция для вас. Для начала, сделайте базовые настройки, чтобы просто начать летать, и уже потом, в процессе, начинайте делать остальные настройки.
В этой статье мы будем рассказывать о Betaflight Configurator версии 10.7 и на основе прошивки Betaflight 4.1.6, хотя есть уже и 4.2. Если у вас другая прошивка, например, CleanFlight, то не все тут будет совпадать с вашей прошивкой, так что, рекомендую все же прошить свой квадрокоптер в Betaflight, так как это самое популярное ПО для дронов, к тому же, часто обновляется.
Резервное копирование
Перед любыми настройками в конфигураторе, делайте полный бекап (резервную копию) кнопкой «Сохранить» на главной странице Betaflight. В случае проблем, вы сможете загрузить ее и все вернуть «как было». С помощью этой кнопки, делается полный бекап. Другие виды бекапов можно делать через командную строку (CLI), об этом читайте здесь: CLI: командная строка Betaflight — как сделать бекап и посмотреть настройки, а также команды
Включите режим эксперта
Флажок «Включить режим эксперта» был сделан для того, чтобы не показывать функции, которые многие пилоты никогда не будут использовать, хотя, скорее всего это сделано для новичков, чтобы они не терялись, им будет доступен минимальный набор важных функций для настройки. Но вы явно уже не совсем новичок, раз читаете эту статью. Поэтому, рекомендуем вам включить режим эксперта:
Порты
На этой вкладке находятся настройки для UART-портов, то есть, для последовательных портов, которые используются для обмена данными с различными компонентами, такими как приемник, видеопередатчик, GPS-модуль и так далее. USB VCP всегда включен, это тот порт, в который вы вставляете провод, microUSB.
В этом разделе обязательно нужно включить порт, который используется для обмена информацией с приемником. У различных полетных контроллеров он может быть разным, у нас Mamba F405 и у него порт для приемника — UART1. Поэтому включен ползунок на Serial Rx. Вам нужно посмотреть документацию к своему полетному контролеру, чтобы точно знать, какой порт включать для приемника.
Конфигурация
На этой вкладке выполняются базовые настройки, такие как протокол связи полетного протокола с регуляторами оборотов, протокол связи приемника с полетным протоколом, расположение платы и многое другое.
После всех настроек, не забывайте нажимать кнопку «Сохранить и Перезагрузить» в нижнем правом углу, иначе у вас не сохранятся настройки.
Приемник и аппаратура управления
После настройки конфигурации, переходим к настройке раздела Приемник, здесь настраивается аппаратура управления.
rxrange 0 981 2005
rxrange 1 987 2011
rxrange 2 972 1996
rxrange 3 987 2011
Сначала копируем и вставляем (не забудьте сначала сделать бекап на первой странице) эти строки в командную строку и нажимаем Enter, сохраняем, переходим во вкладку Приемник и смотрим, какие у нас числа, если в первой строке 1505, то в строке «rxrange 0 981 2005» меняем числа на такие «rxrange 0 976 2000», т.е. сдвигаем оба числа на равное количество пунктов и таким образом корректируем все значения, чтобы везде было 1500. Так обычно никто не делает, но это работает.
Режимы
Этот раздел сделан для настройки разных тумблеров и крутилок на пульте управления.
Мы будем настраивать 2 стика:
Чтобы назначить тумблеру действие, делаем следующее:
Теперь, когда вы переведете этот тумблер, моторы дрона начнут вращаться с маленькой скоростью, дрон будет снят с охраны. Это называется «Заармить».
Так как на странице Конфигурация был включен ползунок на AIRMODE, квадрокоптер сейчас находится в ручном режиме без стабилизации, то есть, в режиме АКРО.
Режим ANGLE это режим стабилизации. Его назначаем на другой тумблер. Обычно эти 2 режима назначают на один тумблер у которого 3 позиции, то есть, на вторую позицию настраивают ARM и АКРО, а на 3 позицию ANGLE режим, чтобы они не накладывались друг на друга и в случае чего, вы просто переведете в верхнее положение тумблер, чтобы включилась стабилизация.
Failsafe
Режим сохранения, то есть, то, что будет делать квадрокоптер, если он потеряет связь с пультом управления.
Здесь есть 2 режима:
Если кратко, функция экстренная и созданная с целью вернуть управления квадрокоптером, а не его посадить, потому что нет дополнительных датчиков. Функция сработает, если вы улетите на расстояние не менее 50 метров (если не ошибаемся, то минимум можно установить 30 метров от точки взлета). Сажать дрон с помощью данного модуля не советуем, так как он ударит дрон о землю (нет других датчиков).
Вся задача модуля — в случае потери связи или, если вы засомневались в своих силах управления на дальнем расстоянии, активируете функцию GPS Rescue (либо она автоматически активируется), дрон поднимется на определенную высоту и полетит в ПРИМЕРНУЮ точку взлета. Главное, чтобы вы смогли перехватить управления на себя и не потерять/разбить дрон.
Обычно включают режим «Падение», так как с «Приземлением» непонятно где он будет приземляться с работающими винтами, а вдруг там будут люди?
Но если выбрали «Приземление», нужно настроить скорость вращения моторов, которые позволят плавно ему спускаться.
Блок «Failsafe переключатель» выполнит действие при активации тумблера, который присваивается функции на вкладке «Режимы». ПРи активации тумблера, выполнится сценарий Этапа 2.
PID-настройки
Сложный раздел, в котором настройки производят далеко не все пилоты, за исключением очень увлеченных и профессионалов.
Углубляться в этой статье нет смысла, так как у нас есть несколько отдельных статей по этому разделу:
Подробнее о том, как настроить фильтры, можете почитать на официальной странице ГитХаба: https://github.com/betaflight/betaflight/wiki/Gyro-&-Dterm-filtering-recommendations.
Вкладка Blackbox
Черный ящик нужно для того, чтобы записывать все данные полета — телеметрию. По мере того, как вы будете набираться опыта, журнал черного ящика будет вашим лучшим другом по настройке своего дрона. Blackbox по умолчанию включен. Данные будут писаться либо во встроенную флеш-память, либо на внешнюю SD-карту. Если у вашего полетного контроллера есть разъем, советуем подключить карточку и убедиться, что туда записываются данные черного ящика.
У всех современных полетных контроллеров есть своя память и это как минимум 16 мегабайт. Этого вполне хватит, чтобы записывать логи полета.
Моторы
На этой вкладке проверяется работоспособность двигателей:
Перед любыми действиями, обязательно снимайте пропеллеры с двигателей!
Питание и батарея
В этом разделе настраивается датчик тока, а также параметры аккумулятора. Все это нужно для того, чтобы квадрокоптер по OSD передавал актуальные и правильные данные об аккумуляторе, напряжении и токе во время полета.
У нас есть отдельная статья по этому блоку, рекомендуем к прочтению: Как откалибровать датчик тока и датчик напряжения в Betaflight
В этом разделе настраивается отображение различной информации на экране ваших очков или шлема. Очень полезный и нужный раздел, не пропускайте его.
Настраивайте все атк, как вам хочется. По центру имитация экрана, там все можно двигать мышкой. Слева поставьте галки на нужном параметре, он появится на окне. Если не знаете, что конкретно означает параметр, наведите мышкой — появится подсказка того, что делает этот параметр.
В нашем случае, включено:
У нас добавлено 2 таймера, один это общее время работы, а второй — время полета.
Справа находятся еще некоторые общие настройки, это тоже настраивается по вашему желанию.
Командная строка (CLI)
Через командную строку можно влиять на какую-либо информацию в прошивке, вносить изменения, а также выводить информацию о каком-либо параметре или компоненте. Список команд большой и выводится по команде «help». Все рассказывать здесь не будем, так как у нас опять есть отдельная статья по командной строке, если вам интересно, то ссылка ниже.
Рекомендации: проверка безопасности
Перед установкой пропеллеров, рекомендую выполнить ряд проверок, чтобы избежать проблем перед полетом.
Проверить направление двигателей
Перейдите во вкладку «Моторы» и включите режим тестирования по кнопке «Я понимаю всю опасность»:
Теперь запустите моторы (надеюсь вы сняли пропеллеры?) и проверьте, в правильную ли сторону крутятся двигатели в соответствии с этой схемой:
Проверить загрузку процессора
Пока квадрокоптер подключен к Betaflight, посмотрите на нижний сайд-бар:
Если загрузка будет 95% и выше, то у вас будут проблемы во время полета, так как процессор перегружен и не будет успевать вовремя обрабатывать данные. Чтобы решить эту проблему, отключите некоторые функции или отключите разгон, если у вас контроллер F4. Но на современных полетных контроллерах такая проблема — большая редкость.
Проверить гироскоп
Перейдите во вкладку Система и и проверьте настройки гироскопа:



