Начало работы с GRASS GIS 7¶
GRASS GIS — мощная геоинформационная система, позволяющая визуализировать, упорядочивать, анализировать и редактировать пространственные данные.
Запуск¶

Если у вас нетбук с небольшим экраном (с разрешением 800×600), окно запуска может оказаться немного сжатым и кнопка [Start GRASS] будет скрыта под списками областей и наборов. Если это произойдёт, то нужно перетащить край окна, чтобы сделать его немного шире. Возможно, придётся переместить окно в верхнюю часть экрана, чтобы освободить место (нажмите клавишу Alt и, удерживая левую кнопку мыши, перетащите окно).
Отображение данных¶
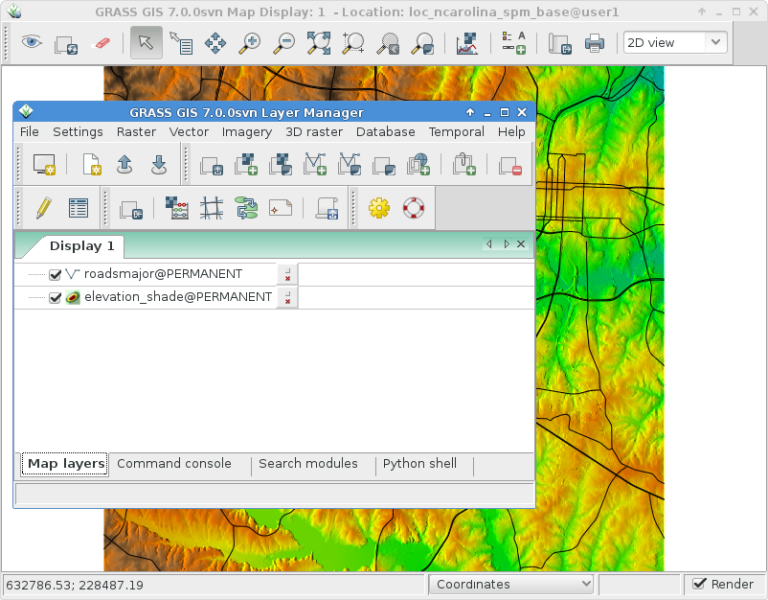
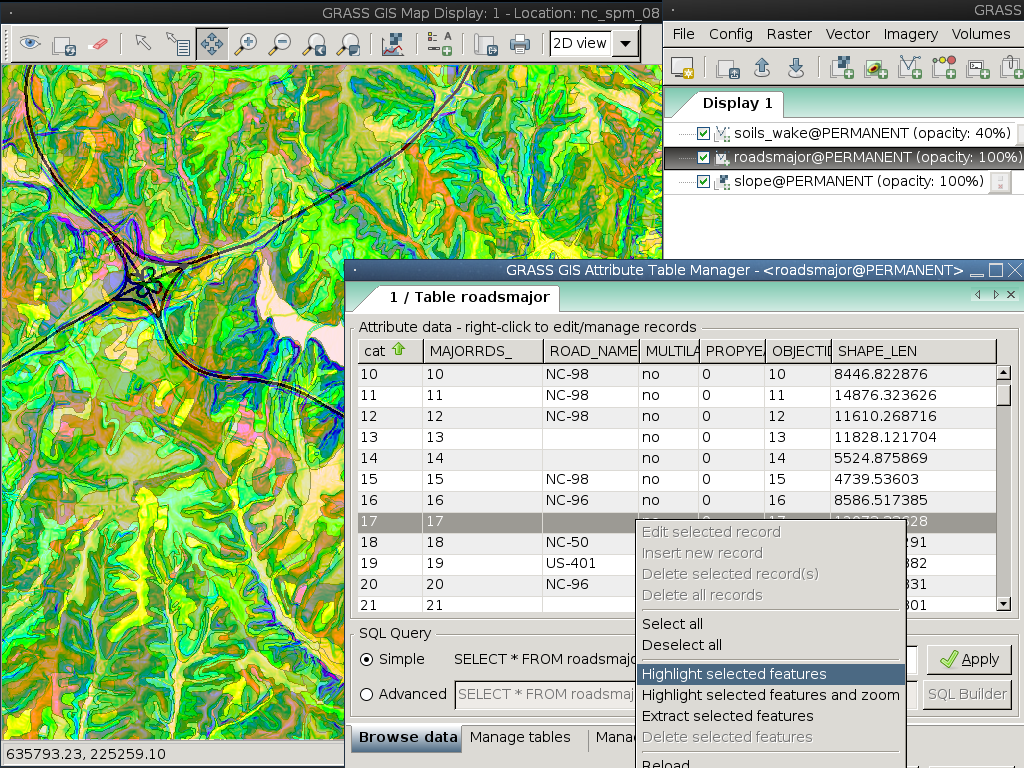
Сходным образом добавим векторную карту “ roadsmajor ” из набора PERMANENT, нажав на панели инструментов кнопку со знаком “+” и изогнутой полилинией, напоминающей букву “V”.
Вам помогут подсказки, всплывающие при наведении курсора мыши на иконку.
Если нужно, щёлкните правой кнопкой на растровом слое карты и выберите “Zoom to selected map(s)” для масштабирования.
Теперь вы должны увидеть растр и векторную карту на экране.
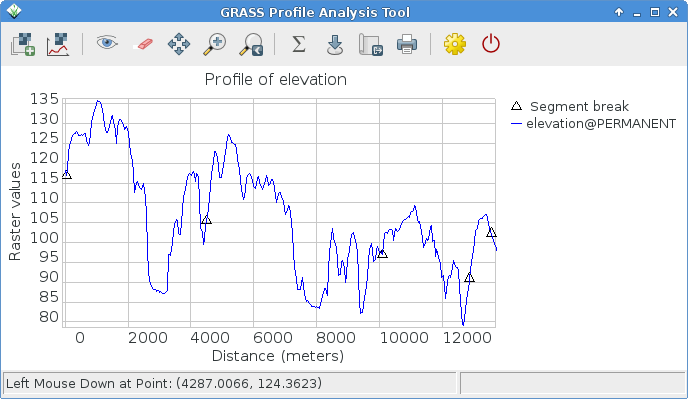
Построение профиля поверхности¶
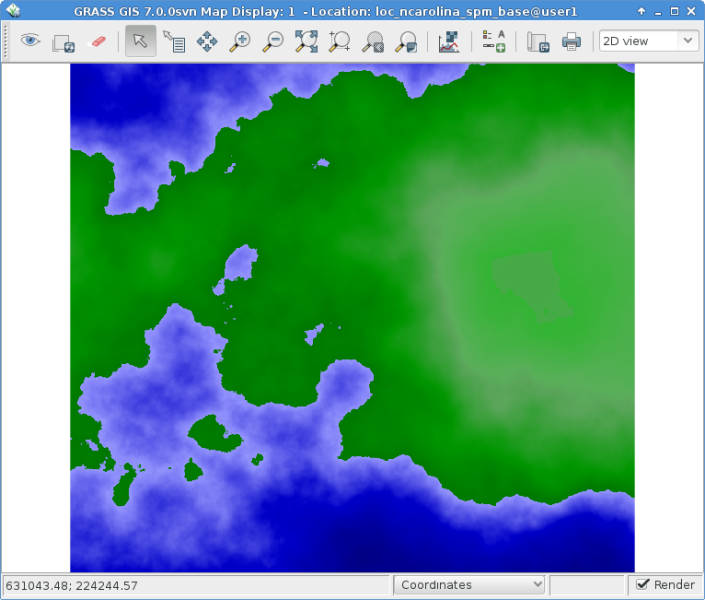
Генерация случайной поверхности¶
Настройка цветового отображения растра¶
Создание растра светотеневой отмывки рельефа¶
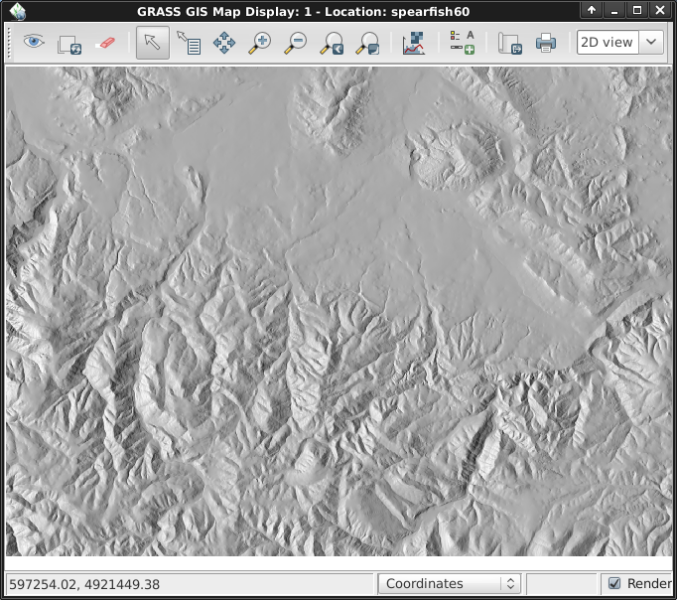
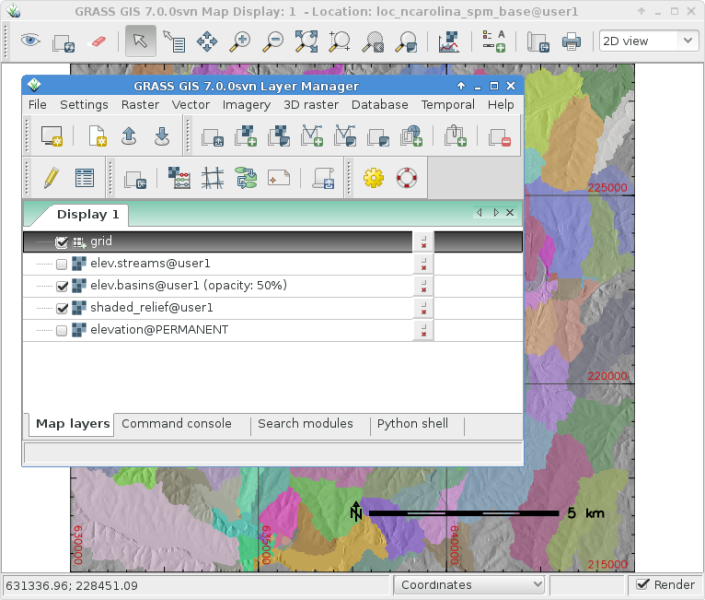
В меню Raster выберите Terrain analysis ‣ Compute shaded relief (этот пункт в меню примерно посередине списка), должно появиться окно модуля. Выберите в качестве исходной карты растр “elevation” @PERMANENT, в качестве имени выходной карты можете указать “shaded_relief”. После этого нажмите [Run]. Вы увидите, что новая карта shaded_relief @user1 добавлена в ваш список слоёв. Снимите галочки с остальных растровых слоёв, чтобы отобразился только вновь созданный растровый слой отмывки рельефа.
Водотоки и бассейны¶
Опять откройте растр elevation @PERMANENT. Если вы изменяли регион после выполнения предыдущего шага, вновь щёлкните правой кнопкой на имени слоя и выберите Set computational region from selected map(s) в контекстном меню, чтобы в расчёте водосборных бассейнов участвовала вся карта.
Охват и масштаб области отображения карты wxGUI не зависят от вычислительных задач геообработки и не влияют на них. Каждый раз проверяйте вычислительный регион с помощью Settings ‣ Region ‣ Display Region ; это имеет фундаментальное значение для всех операций с растрами. Растровые карты, границы и разрешение которых отличаются, будут преобразованы к текущему вычислительному региону на лету.
Модули для работы с векторными данными¶
Описанные выше задачи касались только нескольких растровых модулей. Не делайте из этого вывод, что GRASS чисто растровая ГИС: векторный движок и модули для работы с векторными данными являются не менее функциональными. GRASS полностью поддерживает топологическую векторную модель данных, которая позволяет проводить все виды анализа.
Настройка цветового отображения векторной карты¶
Так же, как мы это сделали с растровой картой, мы изменим цветовую шкалу отображения новой векторной карты водосборных бассейнов. Выбрав basins_areas в списке слоёв, щёлкните правой кнопкой мыши на имени этого векторного слоя и вывберите “Set color table”. На вкладке ‘Define’ щёлкните на выпадающем списке опции “Name of color table” и выберите, например, “bcyr” (blue-cyan-yellow-red). Затем нажмите кнопку [Run] и закройте диалоговое окно v.colors. Вам может понадобиться обновить карту, чтобы увидеть раскрашенный векторный слой.

Работа с атрибутами¶
3D-визуализация¶
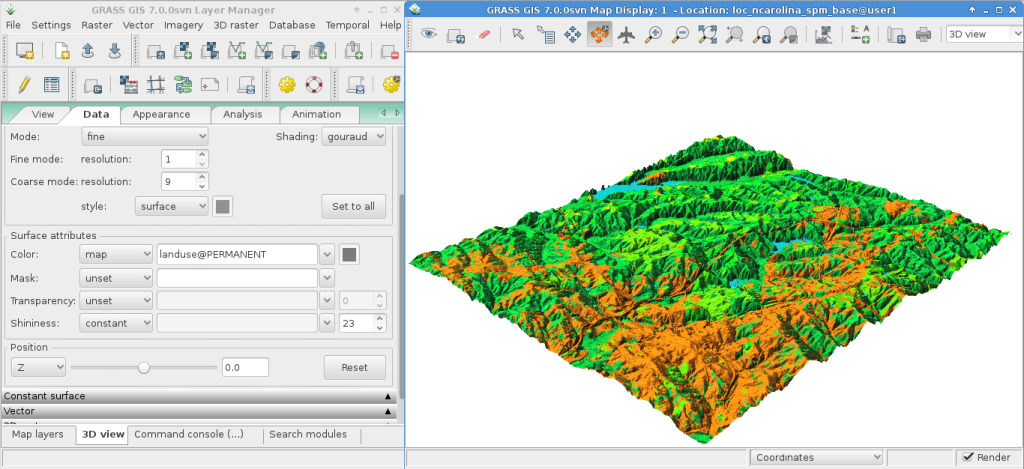
Чтобы запустить инструмент 3D-визуализации, выберите карту elevation в качестве растрового слоя высот в списке слоёв и дополнительно выделите этот пункт, затем выберите “3D view” в окне Map Display (в правой части панели инструментов). После загрузки пользовательского интерфейса 3D-отображения вы увидите несколько вкладок для управления трёхмерным видом. Выберите вкладку “Data” и установите значение “1” для высокого разрешения (чем меньше значение, тем выше разрешение), затем затем перемещайте “кружок” позиционирования и слайдер высоты для получения разных видов.
Чтобы наложить карты, космоснимки или аэрофото поверх цифровой модели рельефа, на вкладке “Data” в пункте Surface Attributes выберите имя карты. Карта “ landuse ” в наборе PERMANENT будет хорошим выбором. Новый вид будет отрисован немедленно.
Для облегчения навигации в окне 3D включите режим “Rotate 3D scene” в панели инструментов отображения карты и используйте мышь для вращения вида.
Что ещё можно попробовать?¶
GRASS (ГИС)
GRASS Development Team
6.4.2 ( 2012-02-19 ; 292 days ago [1] [2] )
GRASS (англ. Geographic Resources Analysis Support System — система для обработки географической информации. Аббревиатура складывается в английское слово grass — трава.) Геоинформационная система с открытым исходным кодом. Поддерживает большое количество форматов. Выпущены версии, работающие под многими операционными системами — Microsoft Windows, Apple Mac OS X, POSIX-совместимыми вообще и Linux в частности.
Содержание
История
GRASS разрабатывается с 1982 года при участии правительства США, научно-исследовательских институтов и компаний.
Особенности реализации
Данная ГИС построена по принципу модульности и интегрирует в себя множество различных модулей, которые решают задачи от визуализации до импорта/экспорта в различных форматов данных. Изначально система ориентирована на работу с командной строкой, однако сейчас имеется два графических интерфейса к данной системе.
См. также
Ссылки
Примечания

Полезное
Смотреть что такое «GRASS (ГИС)» в других словарях:
Список продуктов для создания ГИС — Список продуктов для создания ГИС. ГИС (GIS) географическая информационная система (англ. geographic information system), предназначенная для построения, хранения, обработки и анализа пространственных данных в различных целях: экономика … Википедия
Самара-ГИС (телеканал) — «Самара ГИС» Телеканал «Самара ГИС» Страна … Википедия
Quantum GIS — В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете … Википедия
GeoMedia — GeoMedia это и ГИС технология, и семейство ГИС продуктов, разработанных корпорацией INTERGRAPH. (Аббревиатура ГИС означает геоинформационная система или географическая информационная система.) Технология GeoMedia является архитектурой … Википедия
Список открытого программного обеспечения — Это служебный список статей, созданный для координации работ по развитию темы. Данное предупреждение не устанавливается на информационные списки и глоссарии … Википедия
gvSIG — gvSIG … Википедия
GvSIG — gvSIG … Википедия
Геоинформационная система — ГИС Геоинформационные системы (также ГИС географическая информационная система) системы, предназначенные для сбора, хранения, анализа и графической визуализации пространственных данных и связанной с ними информации о представленных в ГИС объектах … Википедия
GIS-Lab.info — URL: http://gis lab.info Тип сайта: информационный ресурс Владелец: GIS Lab.info … Википедия
GDAL — Geospatial Data Abstraction Library Тип Геоинформационная система Разработ … Википедия
GRASS GIS
GRASS GIS (англ. Geographic Resources Analysis Support System – Система Поддержки Анализа Географических Ресурсов) – бесплатная геоинформационная система (ГИС) с открытым кодом, с поддержкой обработки растровой, топологической векторной информации и компьютерной графики, которая действует на различных платформах через графический интерфейс пользователя и командный процессор в системе X Window. Распространяется на условиях лицензии GNU General Public License.
GRASS GIS разрабатывается с 1982 года при участии правительства США, научно-исследовательских институтов и компаний.
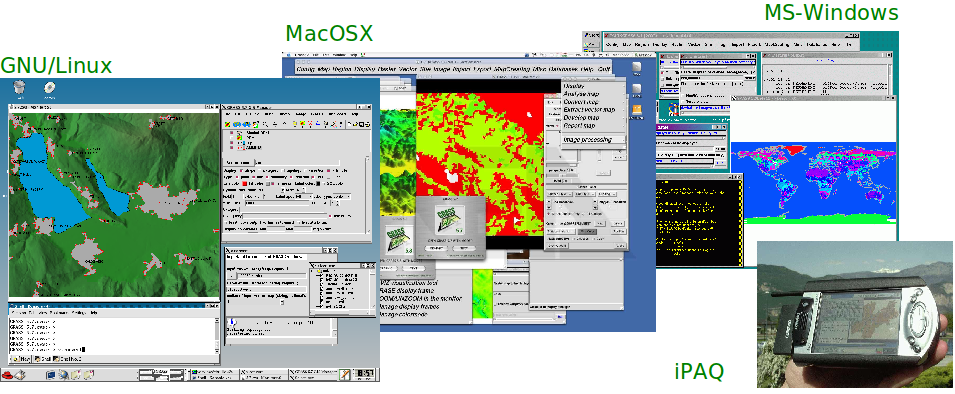
Выпущены версии, работающие под многими операционными системами – Microsoft Windows, Apple Mac OS X, POSIX-совместимыми вообще и Linux в частности.
Последний выпуск GRASS GIS 6 добавляет поддержку новых 2D/3D топологических данных и анализ векторных сетей. Атрибуты данных хранятся в. dbf файлах или в основанных на SQL СУБД как, например MySQL, PostgreSQL/PostGIS, и SQLite. Система может применяться для визуализации 3D векторной и воксельной графики. GRASS GIS поддерживает обширный диапазон растровых и векторных форматов через использование библиотеки GDAL.
GRASS GIS поддерживает обработку растровых и векторных данных в двух и трёх измерениях. Модель векторных данных основывается на топологии, что означает, что области определяются границами и центроидами (границы не могут перекрываться на одном слое). Такой подход противоположен стандарту Simple Features консорциума OpenGIS, который определяет векторы гораздо свободнее, подобно системам векторной графики общего назначения.
GRASS GIS разработан как среда, в которой выполняются различные инструменты, предназначенные для выполнения специфических для ГИС функций. В отличие от обычного прикладного программного обеспечения, после запуска GRASS GIS пользователю отображается модифицированный командный процессор UNIX для вызова команд GRASS GIS (также имеет название модулей).
Среда содержит следующую информацию: географический регион, применены картографические проекции и тому подобное. Во время работы все модули GRASS GIS считывают эту информацию и получают специальные параметры (такие как входные и выходные карты, или значения параметров, используемых в вычислениях). Большинство модулей GRASS GIS и возможностей системы доступны через графический интерфейс пользователя (реализованный в модуле GRASS GIS).
В базовую поставку GRASS GIS включено примерно 200 основных модулей, и более 100 модулей доступны на сайте GRASS GIS. Библиотеки GRASS GIS и основные модули написано на языке программирования C, другие модули написано на C, C++, Python, UNIX shell, Tcl и других языках программирования. Модули GRASS GIS создавались согласно философии UNIX, и, поэтому, могут комбинироваться в скриптах для создания новых модулей, решающих специфические задачи пользователей.
Существует модуль поддержки взаимодействия с QGIS (Quantum GIS). Последние версии QGIS могут выполняться в среде GRASS GIS, превращая QGIS на дружественный графический интерфейс, более похож на графические интерфейсы типовых ГИС.
Там также существует проект, реализации GRASS GIS на платформе Java, известный как JGRASS.
24.5.1. Общие сведения о GRASS GIS¶
GRASS: Geographic Resources Analysis Support System¶
Разрабатывается с 1984 года (USA-CERL). Все это время была открытой ГИС.
Кроссплатформенная: доступны версии для GNU/Linux, MS-Windows, Mac OSX, SUN, …; 32/64 битные системы.
Хорошо документирована, большие коллекции данных. Коммерческая поддержка.
GRASS GIS это¶
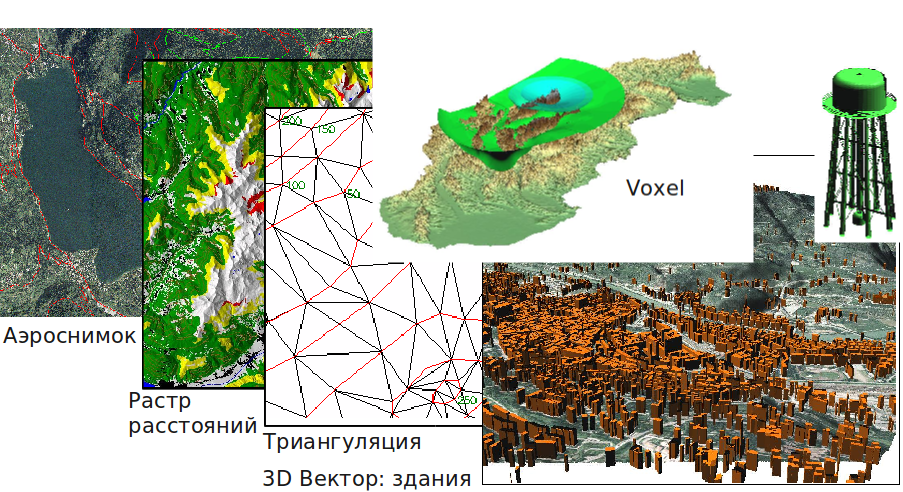
Растровая 2.5D/3D ГИС
Векторная 2D/3D топологическая ГИС
Анализ и обработка графов
Анализ и обработка пространственно-временных рядов
Система обработки изображений
Система 2D и 3D визуализации
Поддержка баз данных:dbf, PostgreSQL, MySQL и sqlite. MS SQL, Oracle (ODBC)
Поддерживает импорт-экспорт всех распространенных растровых и векторных форматов
Поддерживаемые типы данных¶
2D Растровые данные, включая спутниковые снимки и аэрофотосъемку
2D/3D векторные данные с поддержкой топологии
Временные ряды векторных и растровых данных
Устройство GRASS: общие сведения¶
Модульная структура (более 500 модулей)
Модуль — отдельная программа (или скрипт), использующий библиотеки GRASS
Собственные (внутренние) форматы данных для растров и векторов
Детали для программистов¶
Для запуска и работы модулей не нужно запуска граф.интерфейса, только общая инициализация
В основе — принципы Unix: * Принцип «1 модуль — 1 функция» (не всегда) * Модули могут сочетаться / комбинироваться
«Ядро» GRASS и большая часть основных модулей написана на С
Python-библиотека из нескольких модулей: * script — написание скриптов * PyGRASS — Python API
Устройство GRASS: БД, область, набор¶
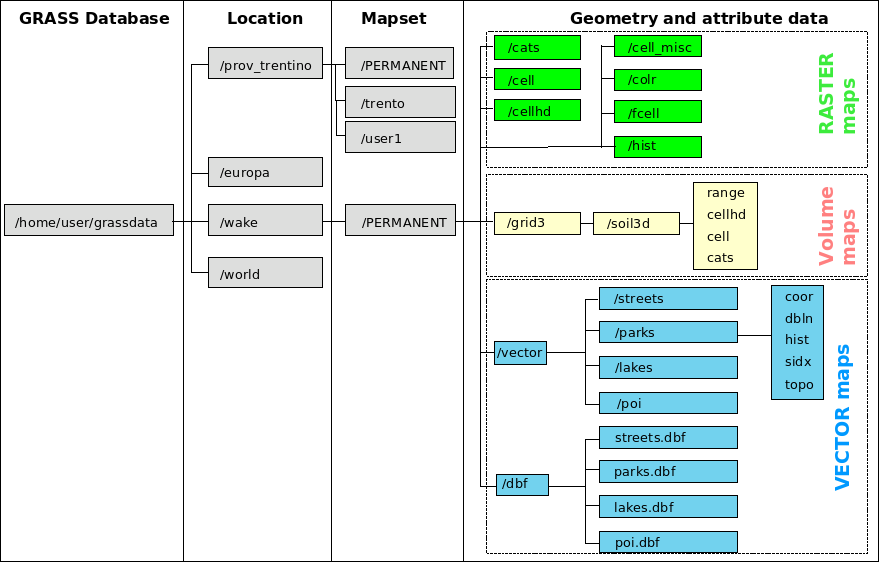
Строгая иерархия данных:
«База данных» (GISDBASE / database) — не настоящая БД, а набор директорий и файлов.
«Область» (location) — наподобие «проекта», определяется системой координат и географ. охватом. Включает наборы данных, информацию о подключении в база данных и т.д.
«Набор» (mapset) — набор данных. Часть проекта (области). Можно настроить отдельные права доступа, задать свой охват. Набор PERMANENT должен быть всегда.
Области/наборы могут создаваться «на лету» (например, в скрипте). Можно переключаться между областями и наборами и/или перебрасывать данные между ними.
Запуск GRASS¶
Запустите GRASS 7 с интерфейсом wxGUI.
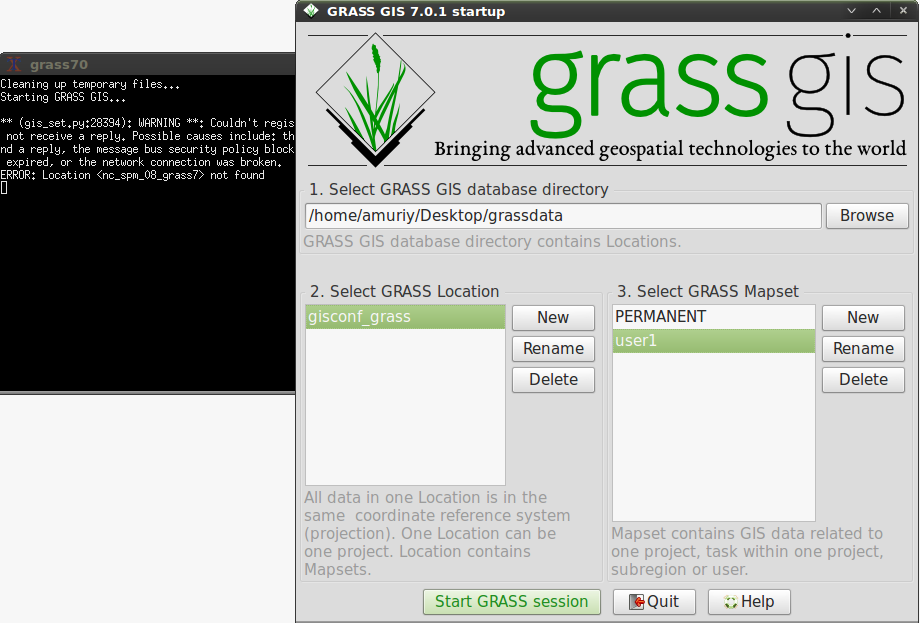
Всегда первым появляется окно терминала, т.к. GRASS запускается через интерпретатор командной строки (bash, CMD.EXE и т.п.)
Затем запускается граф. интерфейс
Интерфейсы: CLI/GUI¶
Командная строка (CLI) — основной метод работы с GRASS (исторически и в силу специфики), графический интерфейс (GUI) — «надстройка»
Графичеcкий интерфейс пользователя — wxGUI — основан на wxPython.
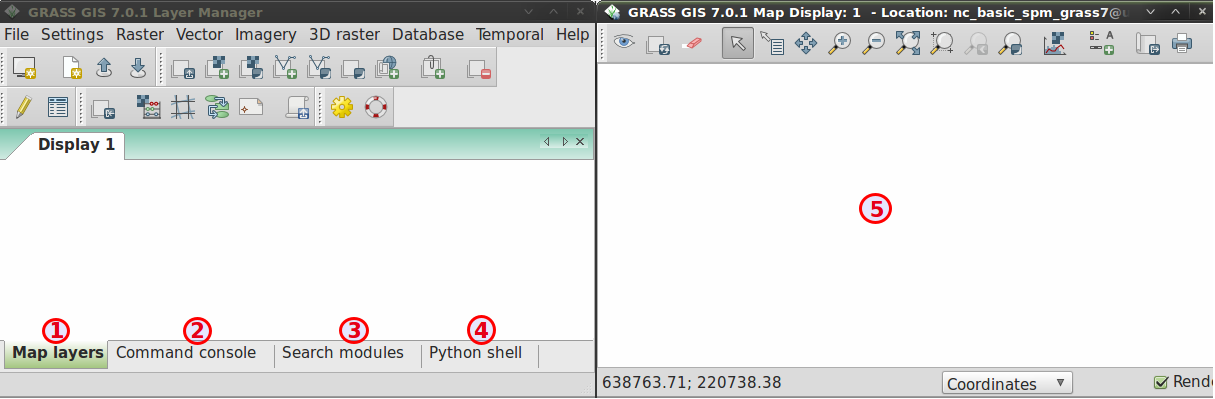
Окно менеджера слоев (1-4): 1. Дерево слоев 2. Командная консоль (урезанная) 3. Поиск модулей 4. Интерпретатор Python
Модули («команды»)¶
Модули разбиты на группы по функциональному назначению, например:
Общее управление ГИС и интерфейсом
Принцип названий: „группа_модулей.имя_модуля“ (g.region, r.to.vect, v.clean и т.п.)
Каждый модуль имеет параметры (опции) и флаги, контролирующие процесс выполнения. Например:
© Copyright 2011-2020, NextGIS. Обновлено: 09-12-2021 18:33.
GIS-LAB
Географические информационные системы и дистанционное зондирование
Базовая оценка транспортной доступности средствами GRASS GIS и QGIS
Построение карт транспортной доступности на основе данных OpenStreetMap средствами открытых геоинформационных систем GRASS GIS и QGIS
Описываемые в статье действия выполнялись в средах Ubuntu 14.04 LTS и Windows 8.1 (x64), GRASS GIS 7.2, QGIS 2.14.
Содержание
[править] Получение и подготовка данных
Для осуществления расчётов нам потребуется набор векторных линейных геоданных, содержащий информацию о дорожно-транспортной сети исследуемой территории. Заполучить подобную информацию можно различными способами: приобрести у специализированных поставщиков, найти в одном из источников открытых данных, оцифровать атлас автомобильных дорог, нарисовать по космическому снимку, и так далее (не забывайте про лицензии данных!). В данном случае мы воспользуемся данными OSM как достаточно качественными и подробными, и, что важно, доступными бесплатно и легально. Начать знакомство с OSM вы можете с этой страницы. Этап подготовки данных являются ключевым: помимо технических этапов, здесь нам предстоит определить транспортные характеристики, которые будут использованы для моделирования.
Для демонстрации принципов базового транспортного моделирования рассмотрим Тосненский район Ленинградской области. Транспорт: автомобиль.
[править] Загрузка данных OSM
[править] Первичная подготовка данных в QGIS
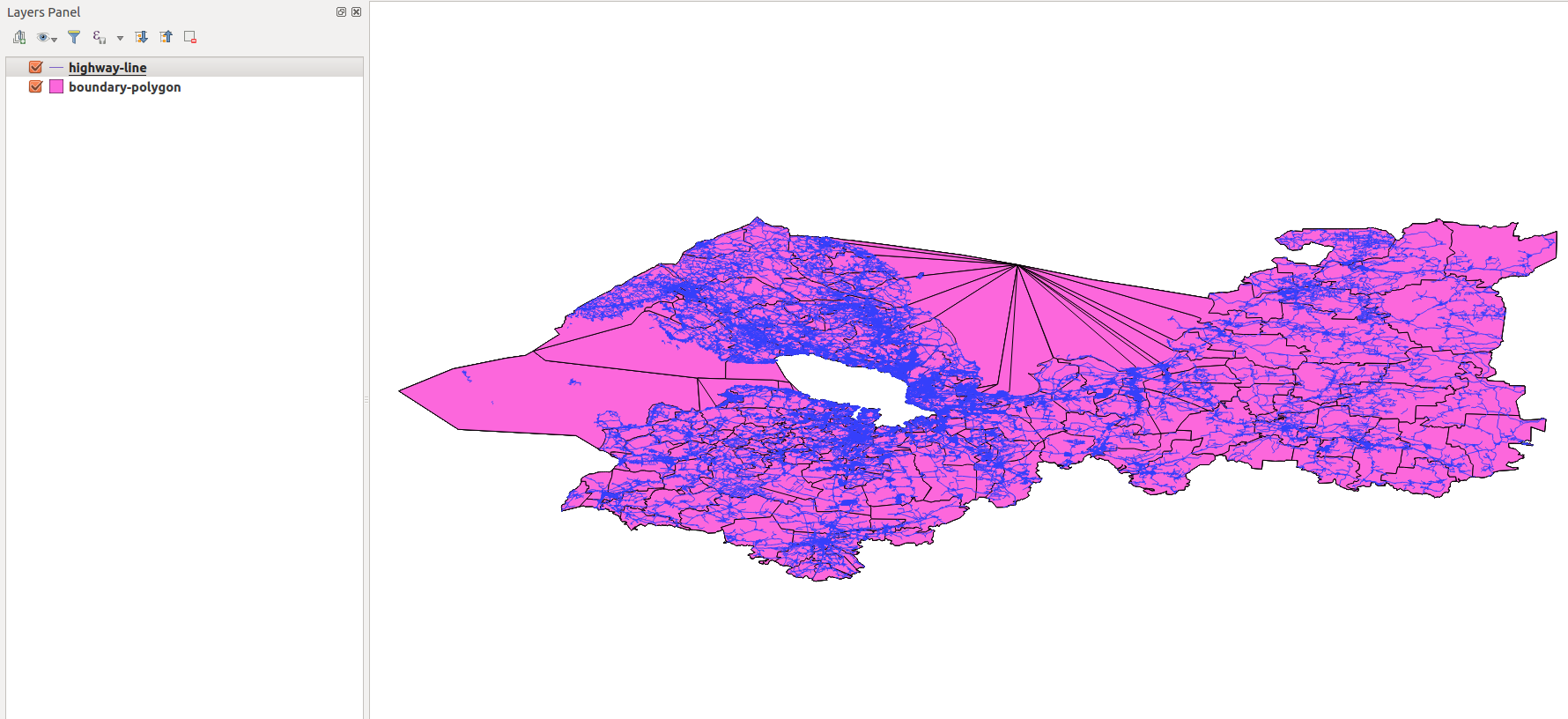
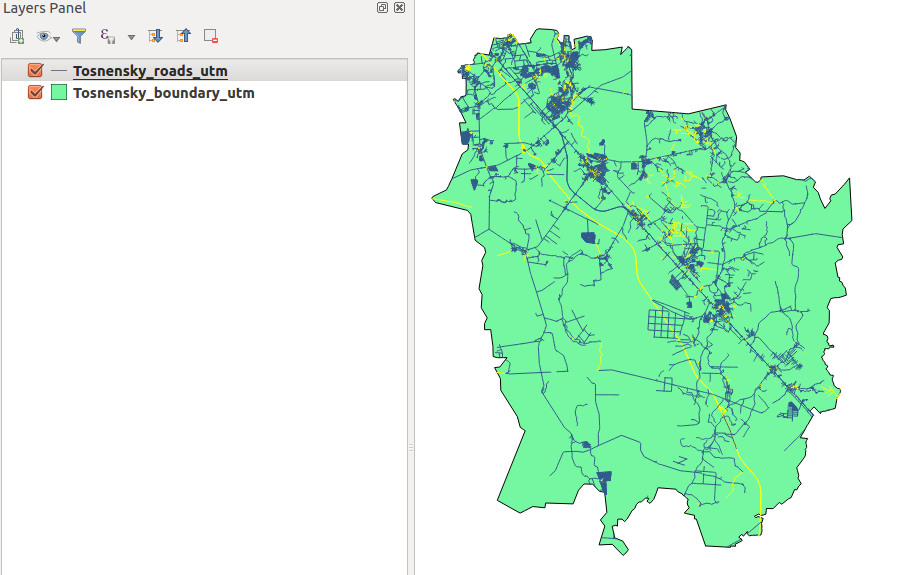
Нужно проявить осторожность с кодировками, и добавлять слои с кодировкой UTF-8 (кодировку можно выбрать в меню выбора векторного слоя при его добавлении). Выглядит это как-то так (цвета могут быть произвольными):

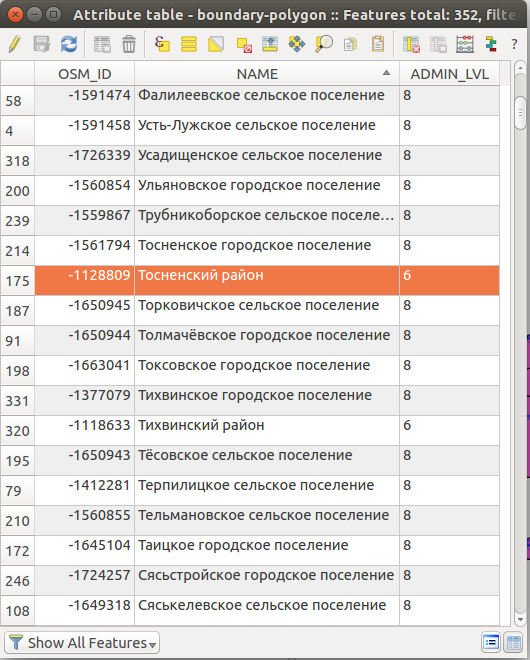
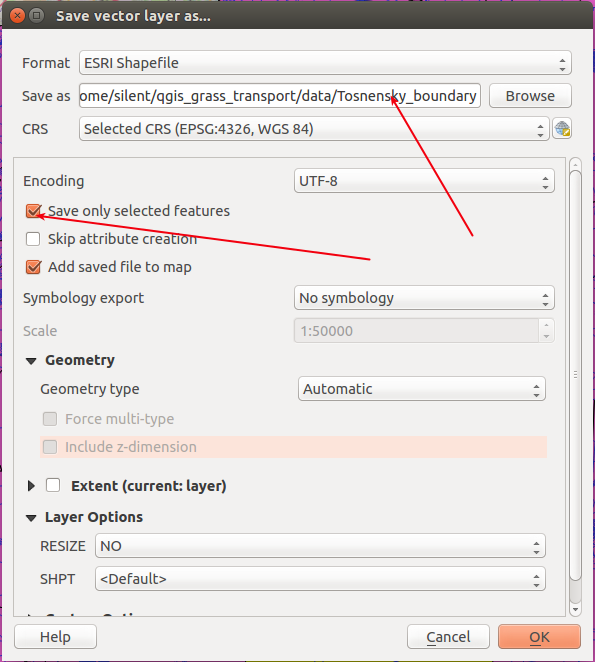
В первую очередь, избавимся от всего лишнего. Найдём полигон Тосненского района и сохраним его в отдельный слой. Для этого в таблице атрибутов слоя boundary-polygon (доступно через контекстное меню слоя) найдём объект с соответствующим содержанием поля NAME. Для этого можно воспользоваться поиском по запросу, либо просто отсортировать колонку и выделить нужную строку. Затем через контекстное меню слоя выбираем «Сохранить как», определяя новое расположение для файла с границами Тосненского района (в моём случае Tosnensky_boundary.shp), и не забываем активировать флаг «Сохранить только выделенные объекты».
Теперь, чтобы избежать возможных проблем с расчётом длин участков дорог (и некоторых других) в будущем, перепроецируем результирующий слой Tosnensky_roads в подходящую систему координат. Для расчётных задач рекомендуется использовать поперечную цилиндрическую проекцию (UTM или Гаусса-Крюгера) для вашей зоны. В данном случае используем WGS 84 / UTM zone 36N (EPSG:32636), для этого через меню «Сохранить как» создаем копию слоя Tosnensky_roads, в выпадающем списке «Система координат», выбрав UTM zone 36N и задав удобное расположение для нового файла (Tosnensku_roads_utm).
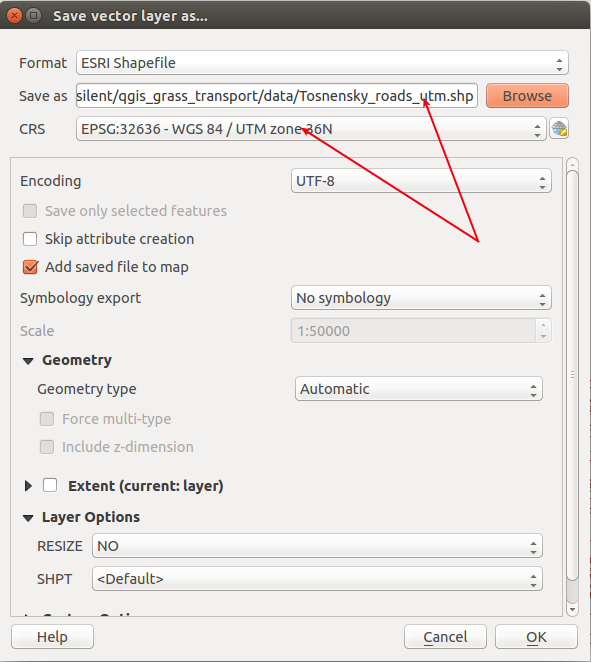
Аналогичным образом перепроецируем слой с границами Тосненского района, на всякий случай (получаем дополнительно Tosnensky_boundary_utm). Данные почти готовы! Теперь нужно отфильтровать геоданные по дорогам с учётом требований к моделированию. Это первый тематический шаг подготовки: отбор только тех объектов дорожной сети, которые могут быть использованы для перемещения предполагаемыми транспортными средствами. Здесь вы должны решить, по объектам каких типов будет разрешено перемещаться, например, для моделирования пешеходного движения можно оставить все типы дорог; для легковых автомобилей исключить пешеходные дорожки, тропы, просеки; для грузовых автомобилей исключить дороги с соответствующими ограничениями на массу, и так далее. Шаг этот очень ответственный. При этом подход к фильтрации сильно зависит от качества исходных данных и их детализации. Вспоминаем, что имеем дело с OSM, где различия между объектами существуют на уровне тегов, которые записаны в таблице атрибутов в поле HIGHWAY. Посмотрим на список уникальных значений для нашего набора данных:
Все эти теги описаны на ресурсах OSM, даже с картинками. Нам ещё предстоит вернуться к этим описаниям, а сейчас важно определить, по объектам каких типов может нормально передвигаться легковой автомобиль, а по каким нет. Очевидно, что нужно исключить объекты следующих типов (пригодны только для пешеходов, проектируются, строятся и т.д.):
Также много объектов с типом unclassified. При осуществлении серьезной работы, конечно, стоит прояснить природу каждого из таких объектов по вспомогательным данным (и внести информацию в OSM, конечно же). В данном случае оставим их как подходящие для работы. Объекты всех отобранных типов нужно удалить. Для этого переходим в таблицу атрибутов слоя Tosnensky_roads_utm, выбираем инструмент «Выбрать по выражению» и формируем запрос вида:
отмечая в списке, соответственно, выбранные вами типы дорог, которые должны быть проигнорированы. Нажимаем кнопку «выбрать» и видим на карте лишние дороги.
Переходим в режим редактирования и удаляем выбранные объекты, сохраняем изменения. Если что, все исходные данные остаются в других слоях. Общая подготовка закончена.
[править] Определение транспортных характеристик данных о дорожной сети в QGIS
Второй этап подготовки является самым важным и трудоёмким в реальных условиях: необходимо каждому участку дороги назначить некоторую среднюю скорость перемещения по нему. Для примера мы используем простую логику: каждому семейству объектов (по тегу) назначим общую ожидаемую скорость, не вникая в каждый отдельный объект. При серьезном исследовании, опять же, стоит более внимательно отнестись к этому этапу, по возможности используя дополнительные материалы. Итак, рассмотрим те категории, которые у нас остались после фильтрации:
Принятые значения достаточно условны, но позволят продемонстрировать принципы дальнейшей работы. Назначаемые скорости довольно существенно зависят от конкретной территории, местного законодательства и так далее. Важно заметить, что у некоторых участков (обычно их немного) в свойствах заполнено значение MAXSPEED, оно может быть как численным (в км/ч), так и вида RU:urban. Расшифровку этих обозначений можно найти, к примеру, здесь и использовать при определении скоростей. В целом этот этап является ключевым, и в боевых условиях здесь важно внимательно и тщательно определить характеристики дорожной сети.
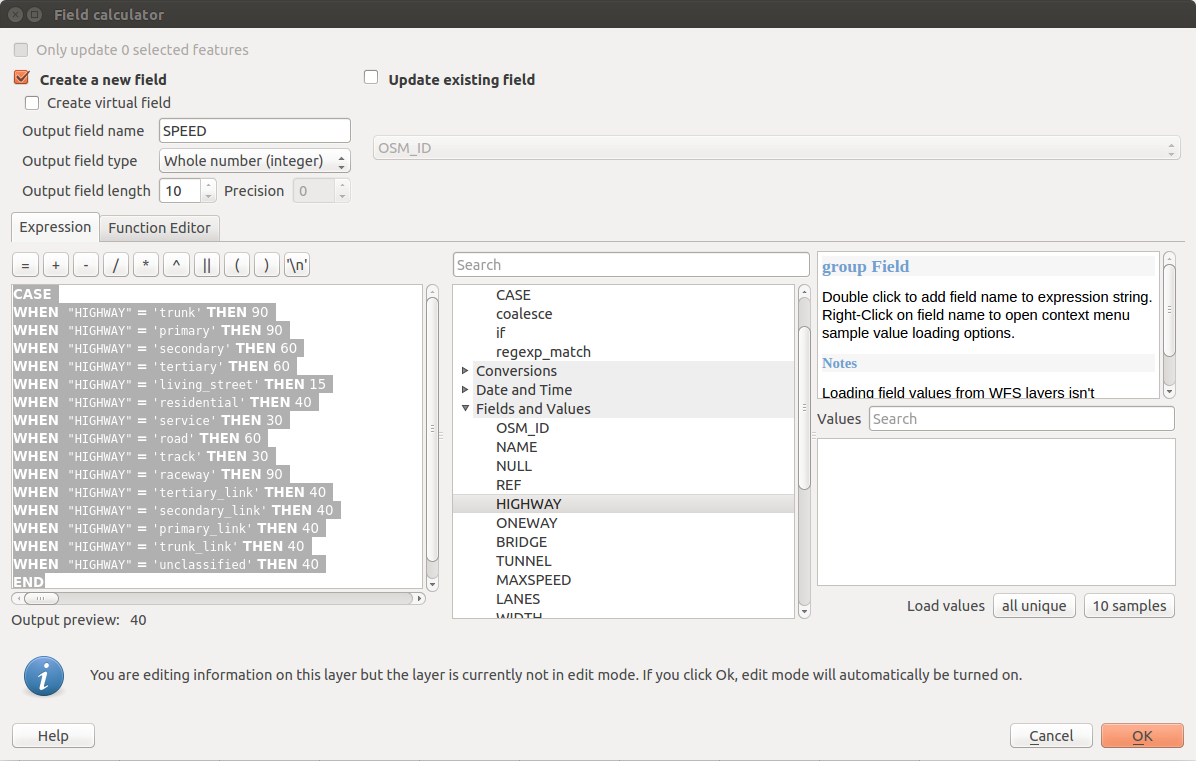
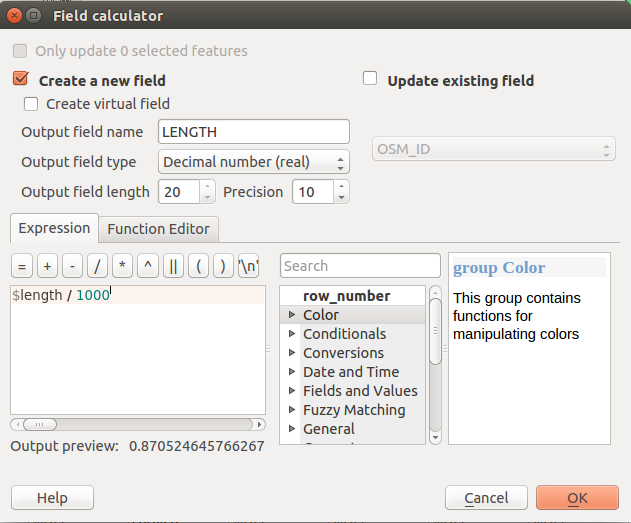
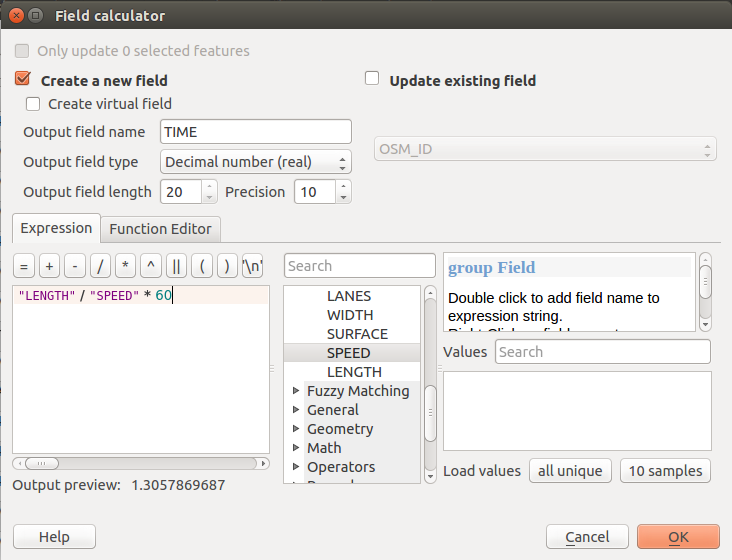
Для того, чтобы применить принятые характеристики, воспользуемся калькулятором полей, запустив его из таблицы атрибутов слоя Tosnensky_roads_utm. Создадим новый атрибут SPEED как целочисленный и заполним его следующим выражением:
Здесь мы проверяем принадлежность каждого объекта слоя к одной из категорий и назначаем скорость в соответствии с определенным ранее значениями. Очень удобно использовать условный оператор CASE.
[править] Подготовка данных через командную строку и утилиты GDAL/OGR
1. Переходим в директорию, содержащую данные OSM, с помощью команды cd:
2. С помощью утилиты ogr2ogr обрезаем слой дорог по границам Тосненского района, одновременно отфильтровывая ненужные объекты дорожной сети и проецируем результат в UTM 36N:
3. Конвертируем набор данных из ESRI Shapefile в SQLite для оптимизации дальнейшей работы:
4. Добавляем в атрибуты колонки SPEED, LENGTH, TIME:
5. Рассчитываем значения скоростей для объектов исходя из атрибута «highway»:
6. Рассчитываем длины объектов дорожной сети
7. Рассчитываем, исходя из скоростей и длин, затраты времени на преодоление объектов дорожной сети:
Теперь у нас есть для каждого участка дорожной сети оценка времени, требуемая для его преодоления. На этом подготовка данных завершена, можно приступать к моделированию и переходить в GRASS. Если вы готовили данные в QGIS, не забудьте сохранить изменения в слое и выйти из режима редактирования.
[править] Моделирование транспортной доступности
[править] Подготовка проекта и данных в GRASS
Запускаем графический интерфейс GRASS GIS. В первую очередь, необходимо создать так называемую «локацию» или «область». Если вы запускаете GRASS впервые, укажите папку для хранения данных (database directory). На скриншоте ниже вы видите, что в качестве такой папки выбрана E:\transport_article
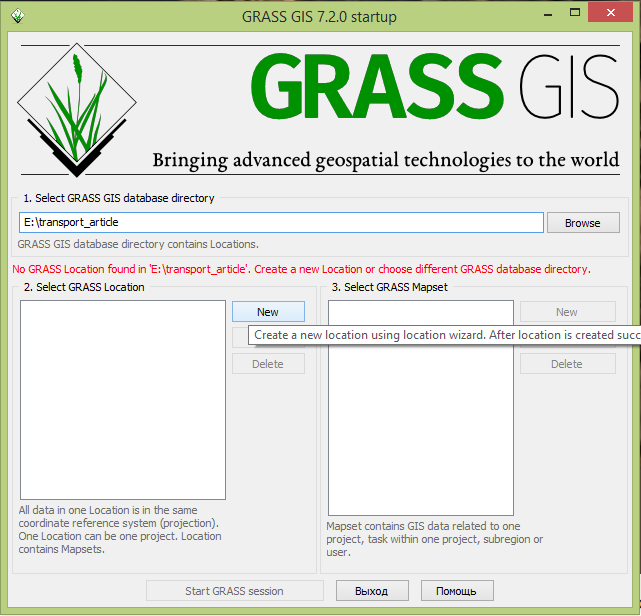
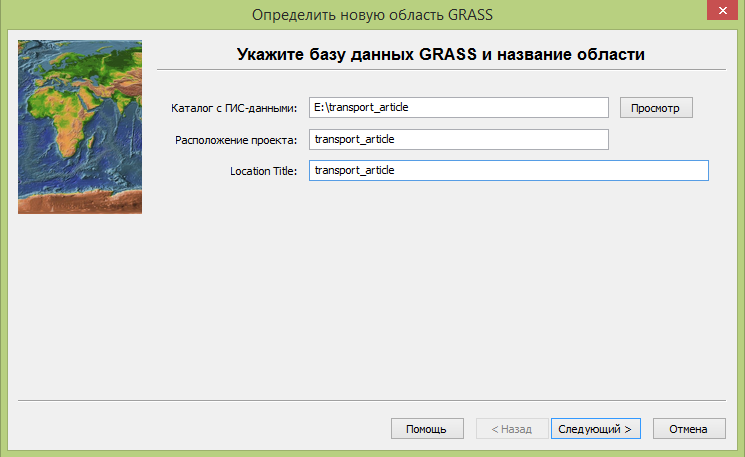
Теперь нужно создать новую локацию (location). Для этого используем единственную активную кнопку New и попадаем в меню, где указываем название директории для хранения данных области внутри database directory, и заголовок для неё. Для простоты в примере использованы те же названия: «transport_article». Таким образом, в папке E:\transport_article будет создана папка «transport_article», доступная для выбора по такому же заголовку.
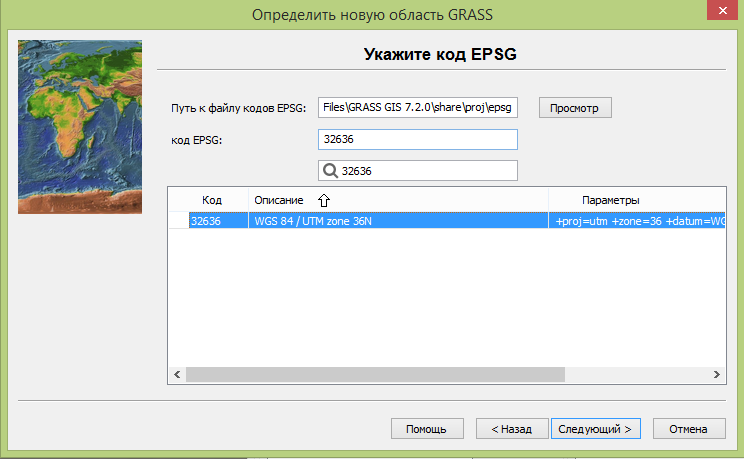
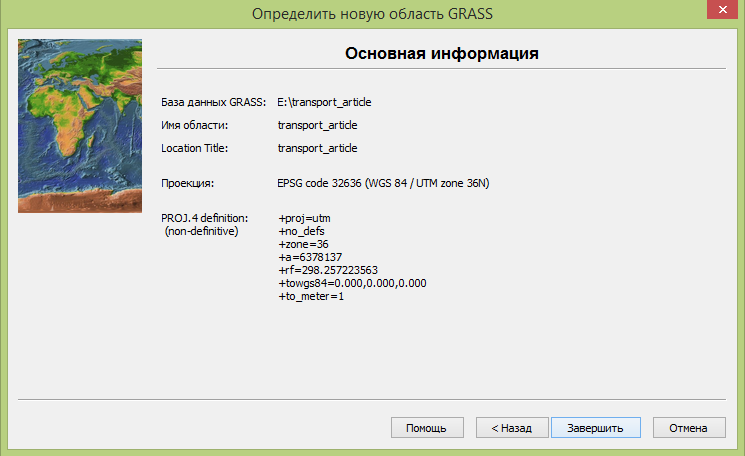
Далее необходимо выбрать систему координат (мы уже знаем, что нам нужна UTM 36N, которую можно найти по номеру или по названию
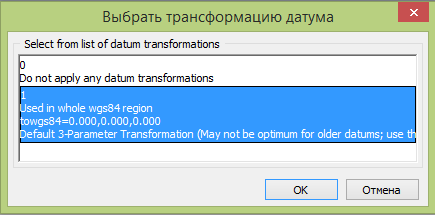
Трансформацию датума на следующем шаге, при использовании UTM, можно выбрать произвольно, т.к. эффект будет одинаков (обратите внимание, что в опции с преобразованием все смещения нулевые).
Далее проверяем, что все параметры правильные, и завершаем создание области.
По завершению создания области будет предложено установить охват и разрешение региона. Это мы сделаем позднее, а сейчас откажемся.

На предложение же создать новый набор («mapset») ответим утвердительно, и создадим его с именем tosno, что будет отсылкой к конкретному району исследования.
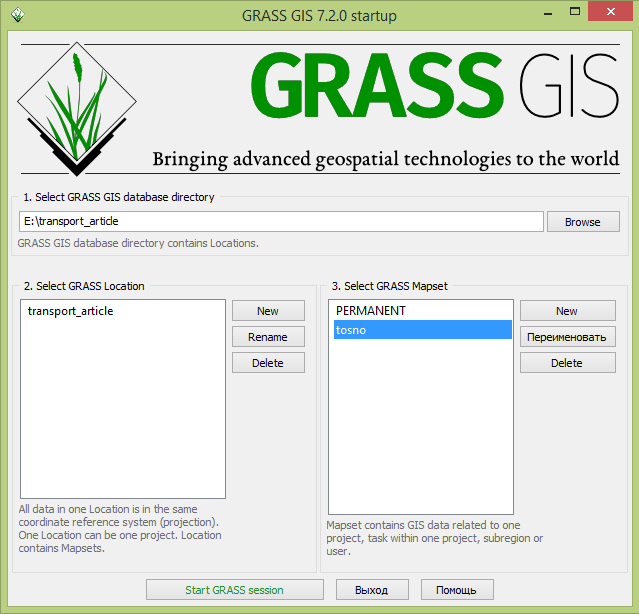
В итоге в стартовом меню появляются созданные локация (tranport_article) и набор (tosno), выбрав которые можно запускать собственно GRASS (кнопка Start GRASS session)
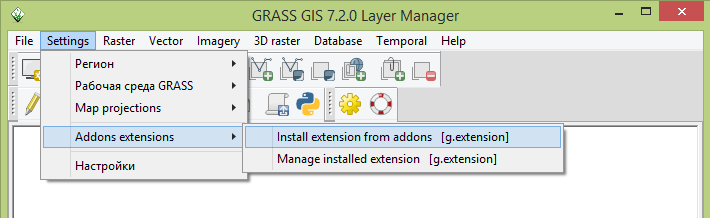
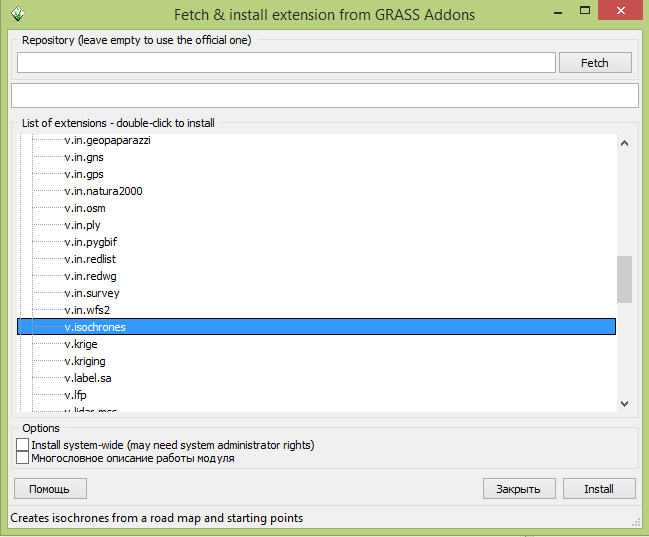
В открывшемся меню в подгруппе vector находим модуль v.isochrones и устанавливаем его.
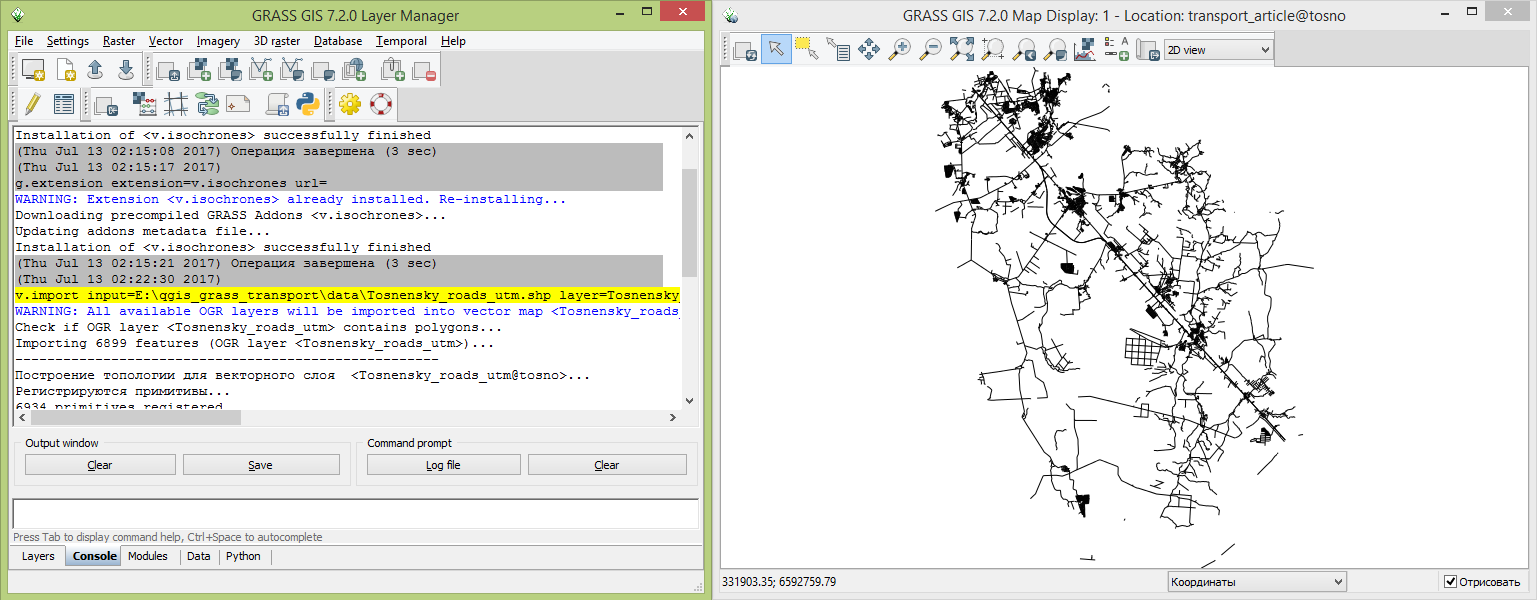
В консоли эта операция тоже выполняется просто:
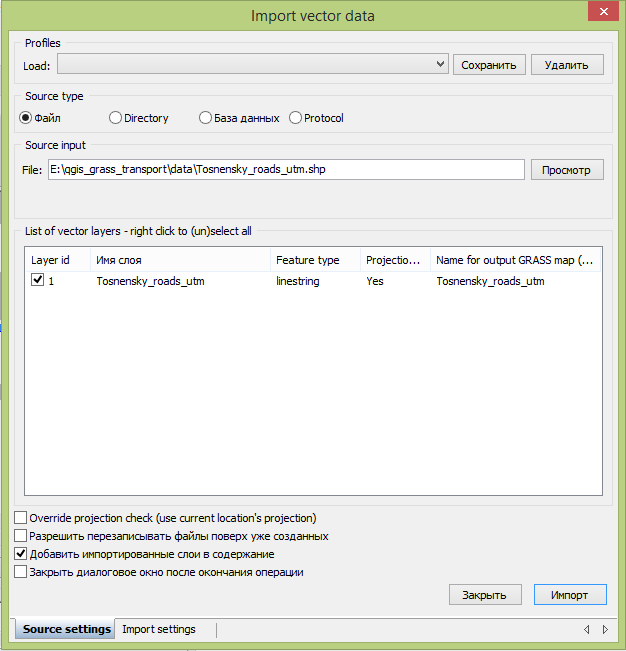
В консоли мы видим результат импорта и базовые сведения о данных, а в окне карты видим простую визуализацию.
Теперь создадим точечный слой, в котором будут содержаться местоположения, относительно которых требуется рассчитать изохроны. Это удобнее делать в интерактивном режиме в окне карты. Перейдем из режима 2D карты в режим оцифровки:
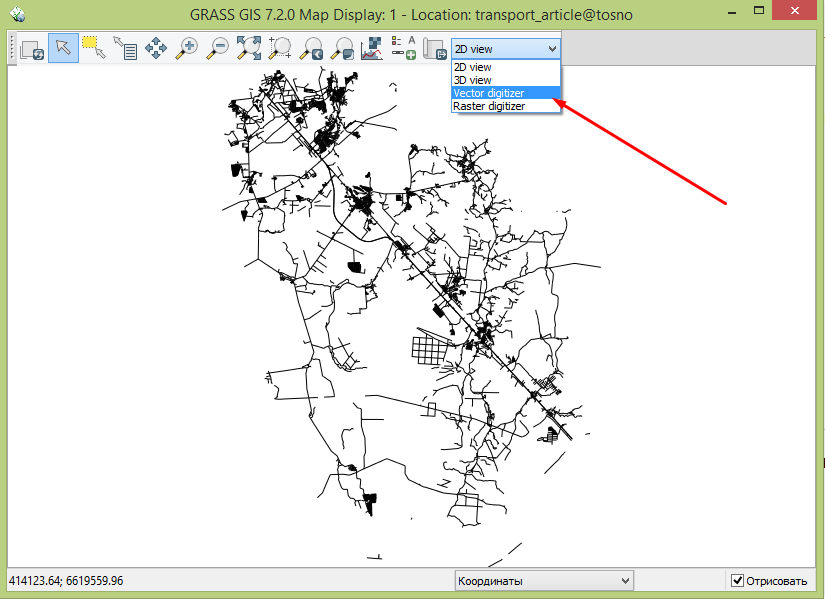
Затем в крайнем слева выпадающем списке выберем опцию создания нового векторного слоя и зададим для него какое-нибудь подходящее название, например, start_points. При этом атрибуты нам не нужны? и соответствующий флаг в меню создания слоя можно снять.



