Автономный контроль целостности
Общее описание
RAIM контролирует расчет GPS координат местоположения объекта, в случае их переопределения. То есть, в том случае когда доступно больше спутников, чем необходимо для определения позиции, полученные дополнительные псевдо измерения должны быть совместимы с рассчитанными координатами позиции. Значения полученные от псевдо измерения, которые существенно отличается от ожидаемого значения могут привести к ложному определению передающего сигнал спутника или иной проблемы нарушающей целостность сигнала (например, ионосферной дисперсии).
Автономный контроль целостности ( RAIM ) обеспечивает целостность системы GPS мониторинга в авиационных приложениях. Для того чтобы GPS приемник мог осуществить RAIM-контроль или составить функцию ошибок(функция разности предполагаемых и наблюдаемых значений измерений),ему должно быть доступно как минимум пять спутников системы. RAIM имеет несколько способов реализации; один из них заключается в проверке совместимости рассчитанных координат положения объекта, при использовании всех возможных групп видимых спутников. Приемник выдает предупреждение пилоту, в случае если в результате проверки рассчитанные таким образом координаты не совместимы. Необходимым условием реализации метода RAIM в любом случае является наличие не менее 5 спутников видимых антенной GPS приемника; алгоритм RAIM, фактически, является статистическим методом.
В связи с этим каждому проведенному тесту – заключению о согласованности полученных от разных групп спутников координат – отвечает определенная вероятность, которая является мерой надежности этого теста о выявления сбоя, когда тот случится. Эта вероятность характеризует целесообразность и надежность проведения данного теста, она зависит от геометрии видимого созвездия спутников и условий окружающей среды, в районе где находится GPS приемник. Целесообразность в данном случае является фактором прооизводительности того или иного алгоритма и характеризует каждый из существующих алгоритмов и методологий системы RAIM. Методы RAIM используются в системах GPS мониторинга и навигации. В качестве примера таких систем можно привести систему GPSMobile.
СОДЕРЖАНИЕ
Общее описание
Используемая статистика теста является функцией остатка измерения псевдодальности (разницы между ожидаемым измерением и наблюдаемым измерением) и степени избыточности. Статистика теста сравнивается с пороговым значением, которое определяется на основании требуемой вероятности ложной тревоги (Pfa).
Автономный мониторинг целостности приемника (RAIM) обеспечивает мониторинг целостности GPS для авиационных приложений. Чтобы приемник GPS мог выполнять функцию RAIM или обнаружения неисправностей (FD), ему должны быть видны как минимум пять видимых спутников с удовлетворительной геометрией. RAIM имеет различные реализации; один из них выполняет проверку согласованности между всеми решениями положения, полученными с различными подмножествами видимых спутников. Приемник выдает предупреждение пилоту, если проверка согласованности не удалась.
Доступность RAIM является важным вопросом при использовании такого типа алгоритма в приложениях, критичных для безопасности (например, в авиации); Фактически, из-за геометрии и технического обслуживания спутников RAIM не всегда доступен, а это означает, что антенна приемника иногда может иметь в поле зрения менее пяти спутников.
Доступность также является показателем эффективности алгоритма RAIM. Доступность зависит от геометрии созвездия, которое находится в поле зрения, и других условий окружающей среды. Если доступность рассматривается таким образом, ясно, что это не функция включения-выключения, означающая, что алгоритм может быть доступен, но не с требуемой производительностью обнаружения сбоя, когда он происходит. Таким образом, доступность является фактором производительности алгоритма и характеризует каждый из различных типов алгоритмов и методологий RAIM.
Обнаружение и исключение неисправностей
Прогнозирование RAIM
GNSS отличается от традиционных навигационных систем тем, что спутники и зоны с ухудшенным покрытием находятся в постоянном движении. Следовательно, если спутник выходит из строя или выводится из эксплуатации для технического обслуживания, не сразу становится ясно, какие области воздушного пространства будут затронуты, если таковые имеются. Место и продолжительность этих отключений можно предсказать с помощью компьютерного анализа и сообщить пилотам в процессе предполетного планирования. Однако этот процесс прогнозирования не полностью репрезентативен для всех реализаций RAIM в различных моделях приемников. Инструменты прогнозирования обычно консервативны и, таким образом, прогнозируют более низкую доступность, чем та, которая фактически встречается в полете, чтобы обеспечить защиту моделей приемников самого низкого уровня.
Поскольку RAIM работает автономно, то есть без помощи внешних сигналов, он требует избыточных измерений псевдодальности. Для получения решения о трехмерном положении требуется как минимум четыре измерения. Для обнаружения неисправности требуется не менее 5 измерений, а для выделения и исключения неисправности требуется не менее шести измерений, однако часто требуется больше измерений в зависимости от геометрии спутника. Обычно в поле зрения находятся от семи до 12 спутников.
Используемая статистика теста является функцией остатка измерения псевдодальности (разницы между ожидаемым измерением и наблюдаемым измерением) и величины избыточности. Статистика теста сравнивается с пороговым значением, которое определяется на основании требований к вероятности ложной тревоги (Pfa) и ожидаемому шуму измерения. В авиационных системах Pfa фиксируется на уровне 1/15000.
Сайты прогнозов RAIM
Чтобы пилоты могли быстро определить, будет ли RAIM на маршруте или на уровне захода на посадку, FAA и ЕВРОКОНТРОЛЬ создали веб-сайты «уровня диспетчеризации», которые прогнозируют статус RAIM в соответствии с требованиями предполетной проверки.
Автономный мониторинг целостности приемника

СОДЕРЖАНИЕ
Общее описание [ править ]
Используемая статистика теста является функцией остатка измерения псевдодальности (разницы между ожидаемым измерением и наблюдаемым измерением) и величины избыточности. Статистика теста сравнивается с пороговым значением, которое определяется на основании требуемой вероятности ложной тревоги (Pfa).
RAIM [ править ]
Автономный мониторинг целостности приемника (RAIM) обеспечивает мониторинг целостности GPS для авиационных приложений. Чтобы приемник GPS мог выполнять функцию RAIM или обнаружения неисправностей (FD), ему должны быть видны как минимум пять видимых спутников с удовлетворительной геометрией. RAIM имеет различные реализации; один из них выполняет проверку согласованности между всеми решениями положения, полученными с различными подмножествами видимых спутников. Приемник выдает предупреждение пилоту, если проверка согласованности не удалась.
Доступность RAIM является важной проблемой при использовании такого типа алгоритма в приложениях, критичных для безопасности (например, в авиации); Фактически, из-за геометрии и технического обслуживания спутников RAIM не всегда доступен, а это означает, что антенна приемника иногда может иметь в поле зрения менее пяти спутников.
Доступность также является показателем эффективности алгоритма RAIM. Доступность зависит от геометрии созвездия, которое находится в поле зрения, и других условий окружающей среды. Если доступность рассматривается таким образом, ясно, что это не функция включения-выключения, означающая, что алгоритм может быть доступен, но не с требуемой производительностью обнаружения сбоя, когда он происходит. Таким образом, доступность является фактором производительности алгоритма и характеризует каждый из различных типов алгоритмов и методологий RAIM.
Обнаружение и исключение неисправностей [ править ]
Прогноз RAIM [ править ]
GNSS отличается от традиционных навигационных систем тем, что спутники и зоны с ухудшенным покрытием находятся в постоянном движении. Следовательно, если спутник выходит из строя или выводится из эксплуатации для технического обслуживания, не сразу становится ясно, какие области воздушного пространства будут затронуты, если таковые имеются. Место и продолжительность этих отключений можно предсказать с помощью компьютерного анализа и сообщить пилотам в процессе предполетного планирования. Однако этот процесс прогнозирования не полностью отражает все реализации RAIM в различных моделях приемников. Инструменты прогнозирования обычно консервативны и, таким образом, прогнозируют более низкую доступность, чем реально встречающаяся в полете, чтобы обеспечить защиту моделей приемников самого низкого уровня.
Поскольку RAIM работает автономно, то есть без помощи внешних сигналов, он требует избыточных измерений псевдодальности. Для получения решения о трехмерном положении требуется как минимум четыре измерения. Для обнаружения неисправности требуется не менее 5 измерений, а для выделения и исключения неисправности требуется не менее шести измерений, однако часто требуется больше измерений в зависимости от геометрии спутника. Обычно в поле зрения находятся от семи до 12 спутников.
Используемая статистика теста является функцией остатка измерения псевдодальности (разницы между ожидаемым измерением и наблюдаемым измерением) и величины избыточности. Статистика теста сравнивается с пороговым значением, которое определяется на основании требований к вероятности ложной тревоги (Pfa) и ожидаемому шуму измерения. В авиационных системах Pfa фиксируется на уровне 1/15000.
Веб-сайты с прогнозами RAIM [ править ]
Чтобы пилоты могли быстро определить, будет ли доступен RAIM на маршруте или на уровне захода на посадку, FAA и ЕВРОКОНТРОЛЬ создали веб-сайты «диспетчерского уровня», которые прогнозируют статус RAIM в соответствии с требованиями предполетной проверки.
Контроль целостности в приемнике СНС (функция RAIM)
Любое оборудование СНС(класса А, В, С) имеет функцию наблюдения за достоверностью информации, получаемой от спутников. Ее назначение:
— своевременно обнаружить неустойчиво работающий спутник и исключить его из обработки для навигационных определений;
— рассчитывать текущую ошибку определения координат и, сравнивая расчетное значение с максимально-допустимой на данном этапе полета, предупредить экипаж о выходе расчетной ошибки за пределы значения;
— рассчитывать геометрию спутников в заданной точке, в заданное время и предупреждать экипаж о том, что требуемая точность и надежность навигации по СНС в этой точке не будут обеспечены, выдавать сообщение об отказе СНС в целом и невозможности ее использовать для навигации. Для решения этих задач бортовое оборудование СНС должно иметь функцию RAIM или аналогичную ей.
Обеспечение этой функции достигается обработкой сигналов, как минимум, одного дополнительного спутника. Такой алгоритм реализован в оборудовании класса А1, А2, В1, В2, С1, С2 и он заключается в том, что в целях RAIM производится несколько независимых определений, результаты которых сравнивают между собой. По результатам этих расчетов определяется четыре устойчиво работающих спутника и по этим «отфильтрованным» спутникам производится определение навигационных параметров (φ, λ, h). При этом «фильтрующие» расчеты при работе RAIM не используются для навигационных расчетов, но если RAIM отфильтровала один из пяти видимых спутников, сама функция RAIM перестает работать, о чем информирует экипаж ВС. Воспринимать такую информацию следует так: навигационные расчеты продолжают выполняться, но аппаратурой они никак не контролируются и эта функция возлагается на экипаж.
Если оборудованием СНС сопровождается 6 и более спутников, то RAIM другого продолжает работать и контролировать надежность навигационных определений.
Альтернативным способом контроля достоверности информации, получаемой от СНС, является сравнение этой информации с навигационной информацией, получаемой от других навигационных систем, таких как ИНС, LORAN-C, DME. Такой способ реализован в аппаратуре подкласса В3, В4, С3, С4 и называется обычно «эквивалент RAIM» или «Бортовая автономная система контроля целостности» (AAIM). Этот способ имеет только одно преимущество по сравнению с RAIM – нет необходимости обрабатывать сигналы от одного дополнительного спутника, что позволяет продолжать навигационные определения с гарантией их достоверности при видимости только 4-х спутников.
Интеграция СНС и ИНС.
Интеграцию СНС и ИНС можно рассматривать на примере НСИ-2000 –интегрированной инерциально-спутниковой навигационной системы.
Система НСИ-2000предназначена для следующих целей:
— определения навигационных и пилотажных параметров движения самолета на основе комплексной отработки информации от инерциальных датчиков (лазерных гироскопов и акселерометров), совмещенного ГЛОНАСС/GPS 24-канального спутникового приемника, а также от системы воздушных сигналов самолета;
— выработки управляющих сигналов и выдачи их в САУ для осуществления автоматического самолетовождения по данным НСИ-2000.
В НСИ-2000 высокие характеристики достигаются за счет рационального комплексирования как входящих в состав системы навигационных измерителей различной физической природы (инерциальных, радиотехнических), так и барометрических.
В системе в качестве инерциального измерителя используется безплатформенная инерциальная навигационная система (БИНС)
В качестве корректирующего радиотехнического измерителя в НСИ-2000 использована аппаратура потребителей (АП) спутниковых навигационных систем ГЛОНАСС/GPS (24-канальный приемник GG-24), обеспечивающая высокоточные измерения координат и составляющих скорости ВС в геодезической системе координат.
Рациональное комплексирование БИНС и АП СНС обеспечивает простоту и удобство начальной выставки и возможности навигации без ограничений относительно всей поверхности Земли, включая полярные области.
Воздушная навигация и аэронавигационное обеспечение полетов на международных воздушных трассах (МВТ).
Единицы измерения.
В мире нет единства в применении единиц измерения, в том числе, и по выполнению навигационных измерений в воздухе, и измерений на земле, связанных с выполнением полётов.
а) морских миль в километры и обратно: 1 NM = 1,852 km; NM — Nautical Mites (морские мили)
Skm x 0,539 = Snm или Skm : 1,852 = Snm ( S число )
Snm = Skm ; 2 + 1/10 частного; 200 km: 2 + 10 km = 110 MM
100 (1000) «МM» 100 (1000) «МM»
б) перевод футов и метры и обратно:
1 ft = 0,305 m; 1m = 3,281 ft;
1ft » 0,3 m; 1m » 3,3ft ;
1000ft х 0,3 = 300 m; 1000m x3,3 = 3300ft
100 (1000) «футы» 100 (1000) «футы»
в) поступательная скорость:
1 kt =1 NM/h =30,86 m/min =0,514 m/s; kt —knot — узел;
Vkt x 1,852 = Vkm/h; Vkm/h x 0,539 = Vk
Перевод скоростей из узлов в км/час и обратно производится аналогично переводу расстояний в морских милях в расстояния выраженные километрах
г) вертикальная скорость:
Vft/min x 0,00508 = Vm/s
Vm/s x 196.85 = Vft/min.
Для практических расчетов принимают:
600 ft/min : 200 » m/s;
4 m/s x 200 » 800 ft/min.
1 hPa = 1 nib ( 1 гекгопаскаль = 1 миллибару);
1 hPa (mb) = 0,75 mm of mercury (мм рт. ст.) или 1 hPa (mb) = 3/4 mm of mercury;
1000 mb x 0,75 = 750 мм рт. ст.;
720 мм рт. ст. х 4/3 = 960 mb.
Перевод давления в дюймах ртутного столба в давление, выраженное в миллиметрах н миллибарах ртутного столба:
1 inch of mercury = 25,4 mm of mercury;
29,76 inches x 25,4 = 756 мм рт. ст.;
1 inch of mercury = 33,863 mb;
29,76 inches x 33,863 = 1007,8 mb.
Высота полета
2.1. Уровни отсчета высот, обозначения высот (рис. 30.1)
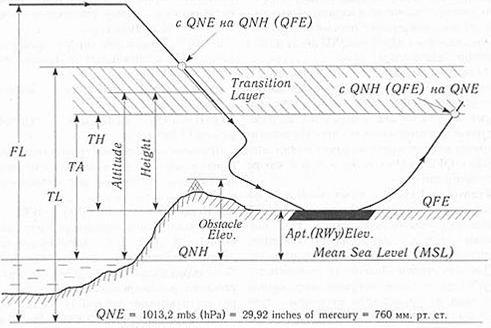
Рис 30.1 Уровни отсчета высоты полета
В практике самолетовождения для контроля высоты полета с помощью барометрических высотомеров используют следующие уровни изобарических поверхностей:
1).Уровень стандартного давления 1013,2 mbs (hPa) или 29,92 inches of mercury или 760 мм рт. ст.
Этот уровень, условно обозначаемый как QNE, используется для контроля высоты при полете по маршруту.
Высота полета задается эшелоном (FL — Flight Levely). По давлению QNE контролируется также высота полета при снижении до эшелона перехода и после высоты перехода при наборе заданного эшелона полета.
2). Средний уровень моря (QNH).
QNH — Altitude above sea level based on local station pressure — абсолютная высота над средним уровнем моря по давлению местной станции наблюдения. Высоту относительно этого уровня называют «Altitude», Давление QNHиспользуется для контроля высоты в районе аэродрома. При снижении ниже эшелона перехода и заходе на посадку, а также в наборе высоты после взлета до высоты перехода. Этот уровень используется и при полете по маршруту на высотах ниже нижнего эшелона полета.
3). Уровень аэродрома или порога ВПП (QFE).
QFE — Height above airport elevation (or runway threshold elevation) based on local station pressure-
— относительная высота над превышением аэродрома (или превышением порога ВПП) по давлению местной станции наблюдения. Высоту относительно этого уровня называют «Height». По давлению QFE контролируется высота полета при снижении ниже эшелона перехода и при заходе на посадку а также после взлета до высоты перехода.
Эшелон перехода, высота перехода и переходный слой.
Transition Level (TL) — эшелон перехода — самый нижний эшелон полета, который может быть использован для полета выше (абсолютно), (относительной) высоты перехода. При снижении ВС на эшелоне перехода устанавливают давление QNH (QFE).
Transition Altitude (ТА) — абсолютная высота перехода — абсолютная высота (по давлению QNH), на которой и ниже которой положение ВС в вертикальной плоскости даётся в величинах абсолютной высоты. На абсолютной высоте перехода переставляют давление с QNH на QNE после взлета в наборе заданного эшелона.
Transition Height (TH) — относительная высота перехода — относительная высота (по давлению QFE), на которой и ниже которой высота полета контролируется в величинах относительной высоты. На относительной высоте перехода переставляют давление с QFE на QNE после взлета в наборе заданного эшелона.
Transition Layer — переходный слой — воздушное пространство между высотой перехода и эшелоном перехода. Этот слой используется для перестановки давления, горизонтальные полеты в нем запрещаются.
Для аэродромов, близко расположенных друг от друга, когда требуется координация действий по управлению воздушным движением. устанавливают общий эшелон перехода и общую высоту перехода.
Эшелоны перехода, абсолютные (относительные) высоты перехода указывают на картах инструментального захода на посадку (Approach Chart) и картах стандартных маршрутов прибытия (STAR) и убытия (SID) воздушных судов.Все относительные высоты на картах захода на посадку даются в скобках рядом с абсолютными.
В случае полета на абсолютной высоте перехода, она должна обеспечить безопасный пролет препятствий по всему маршруту полёта.
Как правило, относительную высоту перехода устанавливают не менее 900 м (3000′). Расчетная относительная высота перехода округляется в сторону увеличения до числа кратного 300 м (1000′).
В США, Канале эшелон перехода рассчитывается по специальным таблицам с учетом давления QNH.
Пример: QNH > 29,92 inches — эшелон перехода FL180;
QNH= 29,91–29,42 inches — эшелон перехода FL185 и т.д
Примечание: Термины «относительная высота» и («абсолютная высота» означают приборные, а не геометрические относительные и абсолютные высоты.
Пересчет давления QNH в QFE.
При выполнении международных полетов воздушные суда, кроме барометрических и электромеханических высотомеров, должны быть оборудованы футомерами. На барометрических и электромеханических высотомерах устанавливают давление QNE или QFE в миллиметрах ртутного столба. При входе в зону FIR аэродрома посадки экипаж получает с помощью ATIS(Automatic Terminal Information Service) давление QNH. Для определения QFEнеобходимо выполнить расчет:
а) Высота аэродрома (порога) в метрах, полученное давление QNH в миллибарах (гектопаскалях). Для определения QFE необходимо знать значение барометрической ступени, т.е. знать, как изменяется высота при изменении давления на 1 мм рт. ст.
Среднее значение барометрической ступени в зависимости от высоты (К м/мм рт. ст.)представлено в таблице 30.1.
Эшелонирование по высоте (табл. 30.2).
Положение ВС в вертикальной плоскости при полете по маршруту выше абсолютной (относительной) высоты перехода выражается через эшелоны полета. Эшелоны полета должны обеспечивать безопасную высоту полета над рельефом местности и искусственными препятствиями а также безопасные интервалы в вертикальной плоскости между ВС следующими на эшелонах. В ИКАО принята полукруговая система эшелонирования
отсчет направления полета ведется от северного направления магнитного меридиана.
Предусматривается также раздельное эшелонирование: для полетов на эшелонах поППП (IFR — Instrument Flight Rules) и ПВП (VFR — Visual Flight Rules).Раздельное эшелонирование применяют только днем при метеорологических условиях, соответствующих ПВП.
Эшелоны полета выдерживаются относительно условного уровня изобарической поверхности с давлением 1013,2 mbs (hPa), 29,92 inches или 760 мм рт. ст.
При полете на Восток (путевые углы0° — 179°) эшелоны нечетные (ODD), при полете на Запал (путевые углы 180° — 359°) эшелоны четные (EVEN), четными являются и эшелоны 310,350, 390,430 и т. д.
| Направление полёта | |||||||||||
| From 000° to 179° | From 180° to 359° | ||||||||||
| IFR FLIGHTS | VFR FLIGHTS | IFR FLIGHTS | VFR FLIGHTS | ||||||||
| FL | ALTITUDE | FL | ALTITUDE | FL | ALTITUDE | FL | ALTITUDE | ||||
| Meters | Feel | Meters | Feet | Meters | Feet | Meters | Feel | ||||
| -90 | — | — | — | — | — | — | |||||
| — | — | — | — | — | — | ||||||
| II300 | |||||||||||
| 4S0 | |||||||||||
| 15S50 | |||||||||||
| etc. | etc. | etc. | etc. | etc. | etc. | etc. | etc. | etc. | etc. | etc. | etc. |
Номер эшелона полета (FL — Flight Level) соответствует сотням футов высоты.
Например, FL180соответствует высоте 18000′
Автономный мониторинг целостности приемника
Используемая статистика теста является функцией остатка измерения псевдодальности (разницы между ожидаемым измерением и наблюдаемым измерением) и величины избыточности. Статистика теста сравнивается с пороговым значением, которое определяется на основании требуемой вероятности ложной тревоги (Pfa).
Автономный мониторинг целостности приемника (RAIM) обеспечивает мониторинг целостности GPS для авиационных приложений. Чтобы приемник GPS мог выполнять функцию RAIM или обнаружения неисправностей (FD), ему должны быть видны как минимум пять видимых спутников с удовлетворительной геометрией. RAIM имеет различные реализации; один из них выполняет проверку согласованности между всеми решениями положения, полученными с различными подмножествами видимых спутников. Приемник выдает предупреждение пилоту, если проверка согласованности не удалась.
Доступность RAIM является важным вопросом при использовании такого типа алгоритма в приложениях, критичных для безопасности (например, в авиации); Фактически, из-за геометрии и технического обслуживания спутников RAIM не всегда доступен, а это означает, что антенна приемника иногда может иметь в поле зрения менее пяти спутников.
Доступность также является показателем эффективности алгоритма RAIM. Доступность зависит от геометрии созвездия, которое находится в поле зрения, и других условий окружающей среды. Если доступность рассматривается таким образом, ясно, что это не функция включения-выключения, означающая, что алгоритм может быть доступен, но не с требуемой производительностью обнаружения сбоя, когда он происходит. Таким образом, доступность является фактором производительности алгоритма и характеризует каждый из различных типов алгоритмов и методологий RAIM.
Обнаружение и исключение неисправностей
Прогнозирование RAIM
GNSS отличается от традиционных навигационных систем тем, что спутники и зоны с ухудшенным покрытием находятся в постоянном движении. Следовательно, если спутник выходит из строя или выводится из эксплуатации для технического обслуживания, не сразу становится ясно, какие области воздушного пространства будут затронуты, если таковые имеются. Место и продолжительность этих отключений можно предсказать с помощью компьютерного анализа и сообщить пилотам в процессе предполетного планирования. Однако этот процесс прогнозирования не полностью репрезентативен для всех реализаций RAIM в различных моделях приемников. Инструменты прогнозирования обычно консервативны и, таким образом, прогнозируют более низкую доступность, чем та, которая фактически встречается в полете, чтобы обеспечить защиту моделей приемников самого низкого уровня.
Поскольку RAIM работает автономно, то есть без помощи внешних сигналов, он требует избыточных измерений псевдодальности. Для получения решения о трехмерном положении требуется как минимум четыре измерения. Для обнаружения неисправности требуется не менее 5 измерений, а для выделения и исключения неисправности требуется не менее шести измерений, однако часто требуется больше измерений в зависимости от геометрии спутника. Обычно в поле зрения находятся от семи до 12 спутников.
Используемая статистика теста является функцией остатка измерения псевдодальности (разницы между ожидаемым измерением и наблюдаемым измерением) и величины избыточности. Статистика теста сравнивается с пороговым значением, которое определяется на основании требований к вероятности ложной тревоги (Pfa) и ожидаемому шуму измерения. В авиационных системах Pfa фиксируется на уровне 1/15000.
Чтобы пилоты могли быстро определить, будет ли доступен RAIM на маршруте или на уровне захода на посадку, FAA и ЕВРОКОНТРОЛЬ создали веб-сайты «диспетчерского уровня», которые прогнозируют статус RAIM для соответствия требованиям предполетной проверки.



