Как установить GPS Rescue в betaflight
Режим спасения в betaflight

Режим GPS Rescue в Betaflight похож на «Возврат домой» в квадракоптерах от DJI. Он поможет вам, когда ваш видео или радиосигнал станут нестабильными, тогда квадрокоптер автоматически вернется к вам обратно при помощи GPS.
Режим GPS Rescue похож на «возврат домой», но в самом простом виде. Квадрокоптер возвращается не туда, откуда он был запущен, а рядом, чтобы вы смогли вернуть сигнал и восстановить контроль. Это полезная функция в Betaflight, особенно если вы летаете на большие расстояния, однажды она сможет вас спасти 🙂
Требования для GPS rescue режим
Это GPS модуль который использую – http://bit.ly/2KZcdR7

Барометр не обязателен устанавливать, но рекомендуется. Он используется, чтобы рассчитать высоту квадрокоптера. Если у Вас его нет, высота может быть рассчитана из данных GPS модуля, но не так точно, как у барометра. Полетный контроллер Kakute F7 имеет встроенный барометр.
Компас не требуется и не используется в GPS Rescue.
GPS Rescue Mode Настройка
После установки GPS модуля и GPS 3D fix (посмотрите в странице Настроек) Вы сможете активировать GPS Rescue.

Возможно, вам придется изменить некоторые настройки в Betaflight, чтобы он работал под ваши настройки и окружение. Обязательно ознакомьтесь с вики-страницей Betaflight, чтобы разобраться, за что отвечают параметры: https://github.com/betaflight/betaflight/wiki/GPS-rescue-mode
Настройки для GPS Rescue доступны на странице Failsafe (сначала вам нужно выбрать Rescue, если вы не готовы использовать Rescue, просто верните Drop)

Вы также можете активировать в CLI. Введите get gps_rescue, получите список параметров, связанных с GPS. Мои настройки, которые изменил в своем кваде.
Вы можете установить gps_rescue_allow_arming_without_fix = ON в командной строке, чтобы позволить вам армится. (но лучше этого не делать, иначе если вы взлетие без GPS FIX и потом что-то пойдет не так, то квад не вернется домой)
Иногда вы можете замечать, что ваш квад летит выше этого числа, потому что высота будет либо этим параметром, либо максимальной высотой, зарегистрированной во время полета + 15 м, которая когда-либо была самой высокой.
Если какое-либо из этих условий не выполнено, режим спасения будет отменен и ваш квад задизармится и упадет. Не очень хорошо, если вы летите например над водой, но в большинстве случаев он должен быть включен.
Вики Betaflight также рекомендует установить для проверки работоспособности значение «Failsafe Only» (RESCUE_SANITY_FS_ONLY), если у вас возникли проблемы с опцией «Вкл.». Он отключает проверку работоспособности, когда режим спасения активируется переключателем, но включает его только тогда, когда он находится в Failsafe. На данный момент это действительно серьезная проблема. Некоторые решили просто полностью отключить ее.
Активация функции GPS Rescue
Есть два способа активировать GPS Rescue: в режиме Failsafe или с помощью переключателя на аппаратуре. Я рекомендую сначала настроить его на аппаратуре прежде, чем использовать его для Failsafe.
Перейдите в Betaflight во вкладку Modes и добавьте переключатель/канал AUX для режима спасения GPS.

Тестирование режима спасения GPS
Снимите пропы, убедитесь, что GPS Rescue активируется переключателем и деактивируется переключателем обратно в режим acro.
Когда вы тестируете с подключенным USB-кабелем, ползунок GPS Rescue не становится желтым, как в других режимах. Это нормально, пока небольшая желтая полоса может перемещаться в диапазоне.
Имейте в виду, что настройки зависят от вашей модели и местности, поэтому обязательно проверьте внимательно. Делайте это в открытом поле без каких-либо препятствий и людей.
Эти GPS элементы в OSD помогут понять Вам, что квад делает.

Перед тестированием убедитесь, что в экранном меню достаточно спутников. Вы также можете включить режим спасения, в полете он будет отображаться как «RESC».
Когда квадрокоптер подлетит близко к вам и сигнал вернется, нужно будете взять управление на себя. Держите ручку газа на уровне 40-50% (выше точки зависания), а ручку крена и тангажа в нейтральном положении.
Отключите GPS Rescue и теперь у вас есть полный контроль над квадрокоптером.
Если вы не отключите GPS Rescue и позволите кваду подлететь к точке взлета, он просто начнет снижаться.
Повторите несколько раз, чтобы привыкнуть к такому поведению.
Использование GPS Rescue для Failsafe
Если вы знаете, что он работает надежно. Вы можете настроить его на failsafe. Перейдите во вкладку Failsafe в Betaflight Configurator. Если вы ее не видите, вам необходимо сначала включить «Экспертный режим» (рядом с кнопкой «Обновить прошивку» вверху).

Как альтернативный вариант Вы можете сделать это в CLI
Обратите внимание, что ваш квадрокоптер войдет в GPS Rescue, если сигнал RC будет потерян, и вернется в режим acro, как только сигнал будет восстановлен. В этот момент возможно, что ваш видеосигнал все еще не восстановлен и вы летите вслепую!
Поэтому важно назначить GPS Rescue на переключатель. Когда произойдет failsafe, Вы активируете режим спасения. Переключитесь в режим acro, когда будете готовы взять управления на себя.
Здорово, что у нас есть такой режим, но нужно обратить внимание на местность в которой летаете. Например, я бы не стал его настраивать на failsafe в лесу или в гараже.
Представьте, что вы теряете управление находясь под деревом или внутри здания. Режим спасения срабатывает и отправляет ваш квад в ветви или потолок!
Если у Вас нет сигнала GPS во время failsafe, квадрокоптер просто упадет.
Что происходит, когда GPS Rescue активен?
Квадрокоптер поднимается на заданную вами высоту или максимальную высоту полета + 15 метров. Затем он начинает лететь туда, откуда был запущен. Это не будет плавным полетом, он может иногда покачиваться влево или вправо, но в итоге доберется до цели.
Он не остановится в том месте, где он взлетел. Он достигнет точки взлета и начнет снижаться, в итоге «приземлиться».
Не стоит полагаться на GPS Rescue при приземлении! Вы можете оказаться на вершине дерева или просто врезаться в землю. Его не волнует, что внизу!
Как только вы вернете видео и радиосвязь, нужно вернуть управление и возобновить полет.
Подключение модуля GPS и проверка
При прочтении этой статьи нам предстоит разобраться как производится подключение GPS модуля к APM контроллеру. Приступаем!
Перед подключением обязательно надо настроить модуль на работу с APM, например для модуля U-blox загрузить конфигурационный файл. Иначе аппарат неправильно будет держать позицию и возможно уже скоро окажется на земле, что создаст больше проблем, чем предварительно правильно настроить модуль!
Далее необходимо проверить наличие на модуле батарейки, которая необходима для сохранения информации о спутниках, чтобы «подключение к спутникам» было быстрым. В этом случае происходит «теплый старт». Если батарейка отсутствует, то модуль будет всегда будет подключаться как в первый раз, т.е. «холодным стартом» и, всегде процедура инициализации будет очень долгой (до десятков минут). Чтобы решить эту проблему, надо подумать, как сделать, чтобы питание на модуле было всегда.
Берём кабель с разъемами DF-13, который идёт в комплекте с модулем GPS, примеряем его к самому модулю. Кабель может быть 4-5-6 проводной — это зависит какая модель GPS в Вашем комплекте!  Разъем DF-13 6pin
Разъем DF-13 6pin  Кабель с разъемами DF-13
Кабель с разъемами DF-13
Дорогой Друг, не торопись всё подключать и делать пробный запуск. Китайцы очень сильно любят, в силу своей не дорогой рабочей силы, что то сделать не так. Поэтому проверяем распиновку контактов — это частая проблема, которая может повлечь за собой выход из строя какого-либо устройства.
Каждый модуль GPS имеет минимум 4 контакта: VCC, RXD, TXD, GND. Подключаем модуль к контроллеру APM 2.5.x и 2.6 следующим образом: VCC и GND-без изменения, а RXD и TXD меняются местами!

Пины на модуле GPS чаще всего подписаны, а вот на APM нет. Привожу изображение с описанием контактов на плате APM.  Разъемы для подключения GPS
Разъемы для подключения GPS 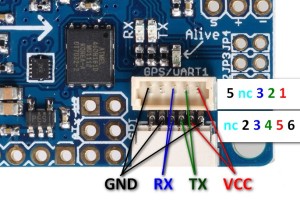 Разъемы для подключения GPS
Разъемы для подключения GPS
Смотрим на собранную схему еще раз проверяем схему и подключенные пины. Если уверенность прям так и прёт, что всё правильно, лучше проверить еще раз. Лишним, поверьте, не будет. В результате должно получиться примерно так:  Модуль GPS подключен к плате APM
Модуль GPS подключен к плате APM
После n-количества раз проверок меняем свое место дислокации, как можно ближе к окну, потому что мы будем ловить сигналы GPS спутников. Определение нашего местоположения необходимо для работы многих полётных режимов Нашего контроллера.
Перед испытанием модуля в совместной работе с APM, можно просто подать питание и положить на окно. На модуле от MyAirBot.com светодиод должен начать моргать голубым, что показывает успешный 3D-fix. На модуле от HobbyKing.com индикатор просто загорится. На модуле от RCtimer.com индикатора нет.
Также компьютер должен иметь доступ в интернет, чтобы Mission Planner скачал квадрат карты под наше положение, которое мы должны увидеть, если все сделано правильно!
Вот мы и сделали еще один шаг, приближающий нас к полету!
maksim4ek, raefa # apmcopter
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
Gps test no fix что значит. Не работает GPS? Починим! Зачем он мне
Что такое «Китайский» GPS и как с ним бороться… или почему не работает GPS на CN (и не только) аппаратах
Основная масса владельцев мобильных устройств, привезенных из стольного града Китая и не только, сталкивается с проблемой «не работающего» GPS. Почему в кавычках? Потому, что он на самом деле работает, и проблема не в самом аппарате (или его GPS-приемнике), а в идущем вместе с аппаратом альманахе GPS спутников. В данной теме я постараюсь кратко раскрыть некоторую теорию GPS-позиционирования и расскажу о том, как без удаления и правки каких-либо системных файлов, в том числе и gps.conf, откалибровать и настроить ваше устройство на правильную работу с GPS.
Для начала немного теории
Система GPS функционирует на основе орбитальных спутников, которые находятся на шести орбитах, высота которых составляет порядка 20000 километров, а скорость движения равна 3000 м/сек (т.е. за сутки каждый спутник совершает два «витка» вокруг Земли). Данные со спутников передаются на двух частотах – гражданской и военной. Военную мы опустим, нашим устройствам она недоступна, а гражданская (1575.42 МГц) позволяет добиться погрешности не более 3 метров (заявленная погрешность в 10 метров у смартфонов или GPS навигаторов обуславливается международным или иным законодательством об использовании GPS в гражданских целях )
Для того, чтобы на нашем устройстве завелся встроенный GPS ему необходим альманах расположения спутников в данной местности и их эфемериды.
Создание альманаха и получение эфемерид
*Для создания альманаха и получения эфемерид спутников необходимо наличие ROOT доступа
Как получить ROOT на вашем аппарате ищите в соответствующей теме, для пользователей Custom прошивок от наших многоуважаемых wizardik»a и psihop»a данный вопрос не актуален ввиду того, что прошивки поставляются ROOT»ироваными по умолчанию.
Включаем GPS (для этого необходимо опустить «шторку» и нажать значок GPS )
При помощи инженерного кода или MobileUncleTools необходимо войти в инженерный (MTK ) режим аппарата (EngineerMode → MTK )

Попав в инженерное меню телефона перемещаемся на вкладку Location и заходим в YGPS

На закладке “Satellites ” Должны быть красные точки (это спутники), а под ними (внизу) шкалы сигнала
Если шкалы сигнала отсутствуют, а спутники (красные точки) есть, то это это говорит о том, что спутники телефон видит, но не подключается к ним из-за неправильно записанного альманаха.

Для правильной работы GPS необходимо создать новый альманах, соответствующий нашему текущему местоположению:
В пункте YGPS переходим на вкладку “Information ”, а затем, с промежутком в 5-10 секунд, поочередно нажимаем на кнопки “full ”, “warm ”, ”hot ”, “cold ” (тем самым вызывая полный сброс старого альманаха).
Warm, Hot и Cold – существует три режима старта GPS приемника:
warm – Время, координаты с некоторыми ограничениями и альманах известны. Эфемерида, как минимум от 3-х спутников, известна после последнего выключения.
*Full, скорее всего, это перебор всех трех режимов для поиска спутников


После нажатия запуска NMEA Log переходим на задку “Satellites ” и ждем 5-10 минут, пока телефон сам не найдет все спутники и не подключится к ним (*не обязательно ко всем ).
Индикацией подключения служат «позеленевшие» точки спутников (напомню, до этого они были красными) и «вдруг» заработавшие шкалы спутников (появятся снизу), Ждем пока шкалы тоже сменят свой красный цвет на зеленый.

Когда GPS приёмник фиксирует спутник, то он показывает «пустой» столбик силы сигнала. В этот момент ещё идёт процесс сбора данных эфемериды. Когда эфемерида каждого спутника принята, соответствующий ей столбик силы сигнала становится зеленым, и данные, принятые от спутника, считаются подходящими для навигации.
После подключения к максимальному количеству спутников возвращаемся на закладку Nmea Log и жмем “stop ”.
Выходим из инженерного режима, запускам Navitel (Яндекс.Навигатор, MapFactor: GPS Navigation, Igo Primo или др. по вкусу) а так же Статус GPS, Google Maps, GPS Тест и другие GPS приложения и радуемся жизни.
И в заключение несколько слов о 2D Fix и 3D Fix
2D Fix и 3D Fix это два режима корректировки погрешности при использовании GPS
DOP – индикатор качества приема сигнала GPS
При 2D Fix корректировка происходит на основании широты и долготы
При 3D Fix корректировка происходит на основании широты, долготы и высоты
Поэтому хорошего DOP»а можно добиться даже с 2D fix
Напоследок ложка дегтя от Navitel:
Не знаю, как в 9 (текущей) версии программы (может пофиксили), а вот в 3 и 5 версиях так точно, DOP отсутствует. Нет, он конечно есть (без него бы он не работал), но исправляет погрешность только в горизонтальной (HDOP) и вертикальной (VDOP) плоскостях
P.S. Для вычисления точных координат при GPS навигации достаточно подключения только к трем спутникам.


35 пользователям понравился пост
NTP_SERVER=ua.pool.ntp.org
NTP_SERVER=0.ua.pool.ntp.org
NTP_SERVER=1.ua.pool.ntp.org
NTP_SERVER=2.ua.pool.ntp.org
NTP_SERVER=3.ua.pool.ntp.org
NTP_SERVER=europe.pool.ntp.org
NTP_SERVER=0.europe.pool.ntp.org
NTP_SERVER=1.europe.pool.ntp.org
NTP_SERVER=2.europe.pool.ntp.org
NTP_SERVER=3.europe.pool.ntp.org
XTRA_SERVER_1=/data/xtra.bin
AGPS=/data/xtra.bin
AGPS=http://xtra1.gpsonextra.net/xtra.bin
XTRA_SERVER_1=http://xtra1.gpsonextra.net/xtra.bin
XTRA_SERVER_2=http://xtra2.gpsonextra.net/xtra.bin
XTRA_SERVER_3=http://xtra3.gpsonextra.net/xtra.bin
DEFAULT_AGPS_ENABLE=TRUE
DEFAULT_USER_PLANE=TRUE
REPORT_POSITION_USE_SUPL_REFLOC=1
QOS_ACCURACY=50
QOS_TIME_OUT_STANDALONE=60
QOS_TIME_OUT_agps=89
QosHorizontalThreshold=1000
QosVerticalThreshold=500
AssistMethodType=1
AgpsUse=1
AgpsMtConf=0
AgpsMtResponseType=1
AgpsServerType=1
AgpsServerIp=3232235555
INTERMEDIATE_POS=1
C2K_HOST=c2k.pde.com
C2K_PORT=1234
SUPL_HOST=FQDN
SUPL_HOST=lbs.geo.t-mobile.com
SUPL_HOST=supl.google.com
SUPL_PORT=7276
SUPL_SECURE_PORT=7275
SUPL_NO_SECURE_PORT=3425
SUPL_TLS_HOST=FQDN
SUPL_TLS_CERT=/etc/SuplRootCert
ACCURACY_THRES=5000
CURRENT_CARRIER=common
На этом все. Всем чистого неба и стабильного сигнала из космоса.
Функция GPS-навигации сейчас есть в каждом современном смартфоне. Большинству людей эта технология нужна практически ежедневно. К примеру, водители, у которых нет автомобильных навигаторов, часто в качестве портативного навигатора используют свой мобильный гаджет. Так как эти устройства не рассчитаны быть полноценными навигаторами, в их работе иногда бывают сбои.
Зачастую это связано с неправильными программными настройками. У многих не работает gps на Xiaomi устройствах, а именно показывает некорректное местонахождение. Существует несколько способов, которые заставят ваше устройство искать спутники быстрее.
Тестируем подключение
Чтобы сравнивать результаты ваших манипуляций с устройством, рекомендуем использовать программу GPS Test. Она покажет вам сколько спутников видит ваш телефон, к каким он подключен и качество этого подключения.
В программе вы найдете еще множество полезных функций, таких как карта спутников, компас, точность и прочее.
Даем доступ нужному приложению

Выбираем требуемое приложения, которое работает с GPS модулем некорректно. Даём нужной программе полный доступ и снимаем все ограничения.
Изменяем системные настройки
Есть ряд пользователей, у которых смартфон находит много спутников, однако отображает неверную точку позиционирования, работает плохо и медленно. Здесь версия прошивки не играет никакой роли. К примеру, на аппарате Xiaomi Mi5 наблюдались проблемы с GPS на большинстве прошивок как кастомных, так и стоковых. Проблема решается внесением изменений в системный файл.

Этот метод был успешно протестирован также на аппарате xiaomi mi4 и нескольких других андроид-устройствах. После внесения изменений в системный файл, смартфон нашёл местоположение точно, с погрешностью всего 2 метра.
Возможные проблемы с MiKey
Довольно банальное решение проблемы, связанное со специальной кнопкой MiKey. Пользователи устройств xiaomi redmi note 3 pro заметили, что gps не работает, когда в телефон вставлена дополнительная кнопка MiKey в разъем для подключения наушников.

На самом деле, некоторые аппараты очень долго соединяются со спутниками вместе с кнопкой.
Как выяснилось, MiKey мешает нормальной работе GPS антенны, поэтому связь устанавливается медленно.
Проверяем контакты gps антенны
Если вы перепробовали все методы, но у вас до сих пор не работает gps, то нужно проверить контакты GPS антенны.
Внимание, данный способ включается в себя разбор устройства, что может стать причиной окончания гарантии. Если вы не уверены в своих силах, то не рекомендуем использовать этот способ. Все действия вы делаете на свой страх и риск.
Данную процедуру стоит делать аккуратно, чтобы не повредить системную плату.

Один из американских пользователей решил пойти другим путем, он отогнул контакты, чтобы они максимально плотно соприкасались с антеннами на внутренней крышке. Его фотоотчет можно увидеть чуть ниже (можно перелистывать фото).
Расположение антенн До исправления После исправления
После проделанных операций, наше подопытное устройство теперь ищет большее количество спутников, качество сигнала увеличилось, а соответственно точность местоположения теперь имеет минимальную погрешность.
Сегодня все современные смартфоны оснащены встроенным GPS модулем, который показывает ваше местонахождение. Вы можете использовать смартфон в качестве навигатора во время занятий спортом или поездок на машине, а также использовать его для получения актуальных новостей или сведений о погоде в вашем городе. Теперь давайте разберемся, как проверить работу GPS на Андроид, то есть, работает ли модуль определения местоположения на вашем устройстве или нет.
Для решения этого вопроса есть 2 варианта, простой с использованием приложения, и чуть сложнее с использованием стандартных возможностей вашего смартфона (инженерное меню).
Проверка и настройка GPS с помощью приложения
Исходя их всех приложений, которые мы перепробовали, самым простым и эффективным оказалось Данная программа сможет быстро помочь найти все спутники в вашем регионе, предварительно их настроить и, возможно, использовать другие функции.
Особенности программы GPS Test для Андроида
Как проверить состояние GPS-навигатора с помощью GPS Test
Открываем приложение, и если видим в левом верхнем углу надпись «3D Fix «, значит, навигатор работает корректно и все свои функции выполняет без малейших проблем. Показывает «No Fix «? К сожалению, с устройством неполадки и его слаженная работа невозможна.
Постоянное переключение между вышеприведенными режимами может быть и из-за плохих условий для получения GPS-сигнала. Это вызывается не только нахождением в закрытом помещении, влиять могут даже неподходящие погодные условия, например, дождь или сильный ветер.
Для наиболее точного определения места, например, в автомобиле, рекомендуем активировать сразу все пункты. Из сетей лучше всего, конечно, работает Wi-Fi, но если условия этого не позволяют (нахождение на улице и т. д., как это обычно и бывает) — используйте мобильный интернет.
Используя данную программу, можно узнать много полезной информации о своем телефоне, и о его дополнительных возможностях.
Настройка и регулировка GPS через инженерное меню
Этот способ поможет проверить качество установленных стандартов, которые показывают, насколько хорошо работает GPS на телефоне.
Видео-инструкция
Плохая работа GPS спутников в помещении
Но не стоит забывать, что GPS может плохо улавливать сигнал во время, когда вы стоите в помещении (особенно в высоко этажном доме) или неподалеку от электрических приборов. Так что использовать функцию определения местоположения лучше на открытой местности (улице) или же, на самый крайний случай, у окна.
Стоит помнить, что GPS лучше не оставлять постоянно включенным, используйте его только по необходимости. Это позволит сохранить заряд батареи в два, а то и три раза дольше. Воспользовавшись виджетами, можно поставить включение и отключение GPS на рабочий стол.
При прочтении этой статьи нам предстоит разобраться как производится подключение GPS модуля к APM контроллеру. Приступаем!
Далее необходимо проверить наличие на модуле батарейки, которая необходима для сохранения информации о спутниках, чтобы «подключение к спутникам» было быстрым. В этом случае происходит «теплый старт». Если батарейка отсутствует, то модуль будет всегда будет подключаться как в первый раз, т.е. «холодным стартом» и, всегде процедура инициализации будет очень долгой (до десятков минут). Чтобы решить эту проблему, надо подумать, как сделать, чтобы питание на модуле было всегда.
Берём кабель с разъемами DF-13, который идёт в комплекте с модулем GPS, примеряем его к самому модулю. Кабель может быть 4-5-6 проводной — это зависит какая модель GPS в Вашем комплекте!


Кабель с разъемами DF-13
Дорогой Друг, не торопись всё подключать и делать пробный запуск. Китайцы очень сильно любят, в силу своей не дорогой рабочей силы, что то сделать не так. Поэтому проверяем распиновку контактов — это частая проблема, которая может повлечь за собой выход из строя какого-либо устройства.
Каждый модуль GPS имеет минимум 4 контакта: VCC, RXD, TXD, GND. Подключаем модуль к контроллеру APM 2.5.x и 2.6 следующим образом: VCC и GND-без изменения, а RXD и TXD меняются местами!

Пины на модуле GPS чаще всего подписаны, а вот на APM нет. Привожу изображение с описанием контактов на плате APM.

Разъемы для подключения GPS

Разъемы для подключения GPS
Смотрим на собранную схему еще раз проверяем схему и подключенные пины. Если уверенность прям так и прёт, что всё правильно, лучше проверить еще раз. Лишним, поверьте, не будет. В результате должно получиться примерно так:

Модуль GPS подключен к плате APM
После n-количества раз проверок меняем свое место дислокации, как можно ближе к окну, потому что мы будем ловить сигналы GPS спутников. Определение нашего местоположения необходимо для работы многих полётных режимов Нашего контроллера.
Перед испытанием модуля в совместной работе с APM, можно просто подать питание и положить на окно. На модуле от MyAirBot.com светодиод должен начать моргать голубым, что показывает успешный 3D-fix. На модуле от HobbyKing.com индикатор просто загорится. На модуле от RCtimer.com индикатора нет.
Подключаем Контроллер к PC по USB (это Мы делали выше) за исключением, что сейчас в схеме находиться подключенный GPS модуль. На устройствах должны загореться светодиоды, запускаем программу MP, жмём кнопку CONNECT. В программе MP смотрим где нарисована линия горизонта, наклон, поворот(по компасу), надпись GPS. Тут может быть три варианта.

Также компьютер должен иметь доступ в интернет, чтобы Mission Planner скачал квадрат карты под наше положение, которое мы должны увидеть, если все сделано правильно!
Вот мы и сделали еще один шаг, приближающий нас к полету!
maksim4ek, raefa # apmcopter



