Perform a DME arc [PDF]
Contents
Preparatory work
Scenario
You will need to open the following charts of Clermont Ferrand airport LFLC in France:

We will be flying the ILS V RWY26 via SOMTI IAF. We will arrive at radial 208° inbound CFA.
Lateral flightpath management
We need to determine entry and exit anticipation.
In order to be at ease, we need to calculate the various headings that we will be using and to execute our anticipation techniques.

In this example we will be flying a ground speed of approximately 200kts.
Using the various formulas at our disposal, we can calculate: 
About the last segment, we will try to be as close as 90° to the exiting radial. Here for example, we will round the 358° track to 352° track. It will not impact much the arc and will ensure an accurate anticipation.
Vertical flightpath management
From radial 198° to radial 168°, the arc distance is: 30 ×12 / 60 = 6 NM
From FL77 to FL65, we have 1200ft to lose, leading to a 6NM-long descent, the 2° path is perfect and the descent will be initiated by radial 198°.
From FL65 to 4500ft, 1032hPa QNH setting will result in an additional 550ft to lose of the wanted 2000ft.
; The descent at 600ft/min at 180Kt should be 13NM long. It represents an angle of: 60 × 13 / 12 = 65°.
Flying the DME arc
Before joining the arc

Here is the initial situation:
The next step will be to prepare our aircraft to join the arc:

Joining the arc
Now, await the anticipation turn distance at 13NM DME:

As soon as the DME deviation is more than 0.2NM, a 30° heading change should be made.
This heading change will allow the DME distance to decrease no more than 0.5NM before increasing again.

First segment
If the DME distance still does not decrease below 12.2NM, continue to correct by adjusting your heading (no more 10° per 10°).
Monitor distance DME:

As soon as the DME deviation is more than 0.2NM, a 30° heading change should be made.
This heading change should allow the DME distance to decrease below 12.2NM no more than 11.5NM before increasing again.
Second segment

We are now ready to turn:
Third segment
On the next picture, we are flying the 3rd leg:

Turning to the last segment

On the next picture, we are turning towards the last leg:
Exiting the arc

Our last segment shall bring us perpendicularly to the exiting radial that we set earlier (262°):
On the next image, we are established on the final approach track. 
Типы маневров RNAV в районе аэродрома
1.13.1. Указатели окончания траекторий
При разработке структуры воздушного пространства с позиции заданных траекторий полета воздушных судов используются только два типа участков маршрутов: прямолинейная траектория или криволинейная между определенными точками.
Использование указанных типов маршрутов позволяет:
— обеспечить программирование (кодирование) заданных траекторий полета в базах данных и вычислителях оборудования RNAV;
— создать надежные, повторяемые и предсказуемые траектории.
Корпорацией ARINC была разработана концепция «Path Termination» (Указатель окончания траектории), которая любую процедуру при полете по маршруту в районе аэродрома (SID, STAR, IAP) разбивает на отдельные участки 23-х типов, каждый из которых однозначно определен с помощью признака «Path Terminator». Большинство навигационных систем RNAV реализуют, как правило, только часть из 23-х ‘Path Terminators’, но и для P-RNAV требуется далеко не весь их перечень.
 |  |
Fly-by Waypoint coincident with Compulsory Repotting Point
Точка пути флай-бай совпадает с пунктом обязательного доклада
Fly-over Waypoint coincident with VOR/DME Точка пути флай-овер совпадает с VOR/DME
Fly-by Waypoint coincident with NDB Точка пути флай-бай совпадает с NDB
Path Terminator образуется из двух заглавных букв — первая характеризует заданную траекторию полета, а вторая показывает, где или как кончается данный участок траектории полета. В табл. 1.8 представлен принцип кодирования типов участков окончания траекторий в соответствии с ARINC 424.
Далее рассмотрены только те участки траекторий из Path Terminators, которые требуются и рекомендуются при выполнении полетов P-RNAV согласно [13].
Требуется выполнять маневры и выдерживать следующие типы траекторий:
— IF — выход на точку из любого текущего места ВС;
— TF — полет по линии пути, соединяющей две последовательные точки ЛЗП;
— CF — полет на точку с заданным путевым углом;
— FA — полет от точки с заданным путевым углом до достижения заданной высоты;
— DF — полет от текущего места ВС прямо на точку без заданного путевого угла.
Принцип кодирования типов участков окончания траекторий
Course from fix to
AF, CF, DF, HF, IF, TF, RF
Holding pattern terminating at
Примечание. Жирным наклонным шрифтом выделены участки траекторий, применяемые при использовании RNA V.
Рекомендуется выполнять маневры и выдерживать следующие типы траекторий:
— НМ — полет по процедуре ожидания до ее принудительной (ручной) отмены;
— НА — полет по процедуре ожидания с отменой при достижении заданной высоты;
— HF — полет по процедуре ожидания с отменой над Holding Fix после одного круга;
— RF — полет с заданным радиусом относительно заданной точки.
Описание кодированных точек и типов траекторий для зональной навигации Р-
RNAV и RNP-RNAV в соответствии с ARINC 424 дано в табл. 1.9.
Остальные 14 участков траекторий не применяются в процедурах P-RNAV и RNP-RNAV.
Типы точек и траекторий
 |

 |  |  |  |
 А В » title=»Типы маневров RNAV в районе аэродрома» width=»653″ height=»198 «/> А В » title=»Типы маневров RNAV в районе аэродрома» width=»653″ height=»198 «/> | |||
 |


 |
 |
 |
IF — Initial fix — начальная контрольная точка; обязательна для всех участков маршрутов, основанных на P—RNAV и RNP-RNAV, и определяет начало участка.


 Продолжение табл. 1.9
Продолжение табл. 1.9
ИР — определяет зону ожидания (30)” над точкой А. Автоматически отменяется при первом прохождении точки А после того, как была выполнена процедура входа в 30. Чаще называется Racetrack.
НА — Hoidmg/Racetrack to an altitude, рекомендуется для P-RNAV, обязательно для RNP-RNAV. Автоматически отменяется при первом прохождении точки А после того, как ВС достиг заданную высоту. ‘
HW1 — Holding/Raceirack to a manual termination, рекомендуется для P-RNAV, обязательно для RNP-RNAV. Отменяется вручную летным экипажем.
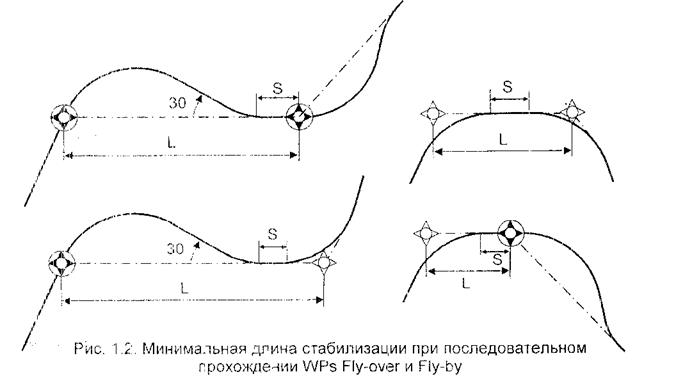
На схемах в районе аэродрома после прохождения точки Fly-over возможны только три типа участков — DF (Direct to fix), TF (Track to fix), CF (Course to fix). Информация об указателе окончания траекторий публикуется в АИП. Однако и по картам Jeppesen можно определить указатель окончания траектории: если на участке схемы опубликован ЗПУ — это TF или CF, а если участок схемы обозначен точками пути без ЗПУ — это DF.
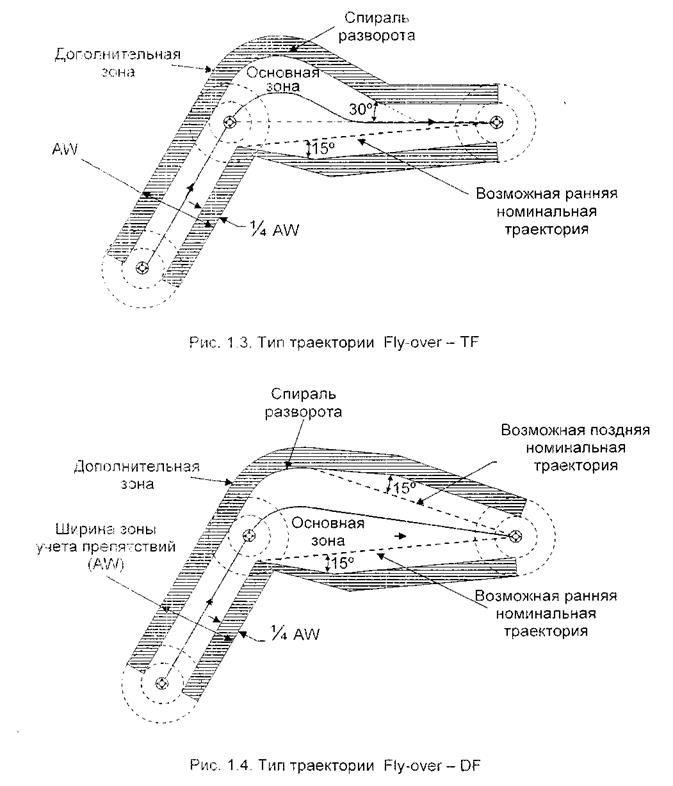
1. Траектория Fly-over — TF устанавливается в случае, когда после прохождения Fly-over требуется выход на новую линию пути, при этом угол выхода не менее 30°.
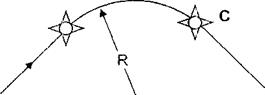
Защищенное воздушное пространство для учета препятствий рассчитывается из предположения, что ВС будет выходить на осевую линию следующего участка с углом выхода не менее 30° (см. рис. 1.3).
2. Траектория Fly-over — DF обычно устанавливается на схемах вылета, что позволяет более плавно разворачиваться для полета на следующую точку пути.
При этом выход на новую линию пути не обязателен, поскольку защищенное воздушное пространство учета препятствий вокруг такой траектории расширено (рис. 1.4).
3. Траектория Fly-over — CF устанавливается на схемах RNAV-ILS, когда в завершении процедуры RNAV после пролета точки Fly-over выполняется разворот для выхода в створ курсового маяка ILS с углом выхода 30°.
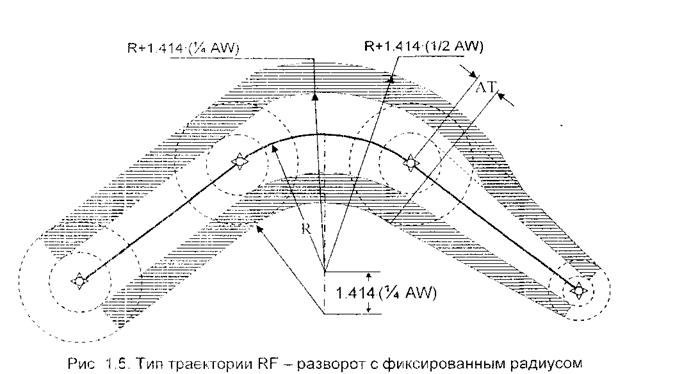
4. Тип участка RF — разворот с фиксированным радиусом.
Тип участка RF может устанавливаться в сложной структуре воздушного пространства и требует точного выдерживания траектории полета, особенно при больших углах разворота. А кроме того, использование данного типа участка позволяет уменьшить область учета препятствий по сравнению с использованием разворотов в точках Fly-by и Fly-over. Данный тип участка устанавливается в схемах захода на посадку и схемах вылета, основанных на RNP-RNAV.
Назначение RF — переход с одного участка схемы на другой по предписанной криволинейной траектории, поэтому RF рассматривается как отдельный участок схемы, имеющий три точки пути: начальная RF, конечная RF и точка, от которой задается радиус разворота. Эта точка называется «центр разворота» (рис. 1.5).
Защищенное воздушное пространство вокруг RF построено из условия, что ВС будет регулировать крен при развороте таким образом, чтобы с учетом влияния ветра выдерживать заданный радиус разворота. По этой причине невозможно опубликовать заданный крен для RF, поскольку он зависит от сложившейся обстановки — скорости полета и воздействия ветра.
Предполагается также, что ВС начинает создавать крен для разворота еще до прохождения точки начала RF. То же и в конце RF — вывод из крена начинается до конечной точки RF. По сути, точки начала и конца RF являются точками Flyby.
HDMI ARC и eARC — зачем их разработали и стоит ли гнаться за возвратным каналом в ресиверах и ТВ?
Разбираемся с подключением телевизора
HDMI ARC и eARC — зачем их разработали и стоит ли гнаться за возвратным каналом в ресиверах и ТВ?
Разбираемся с подключением телевизора
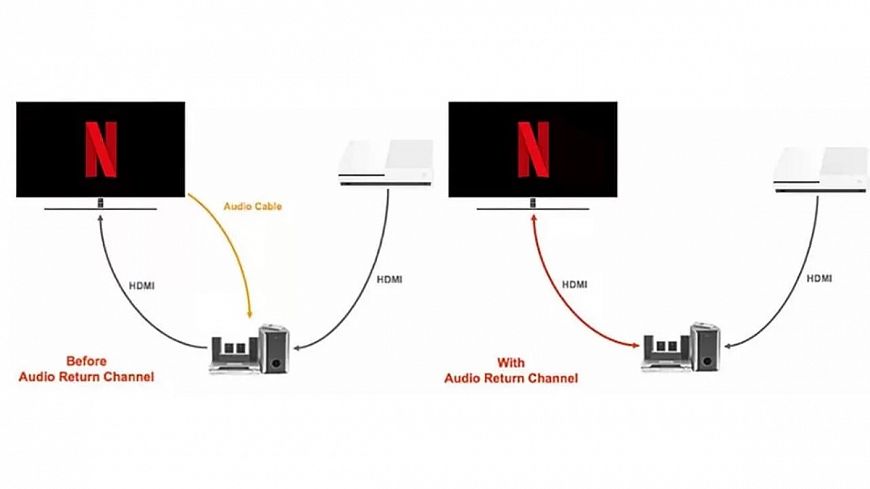
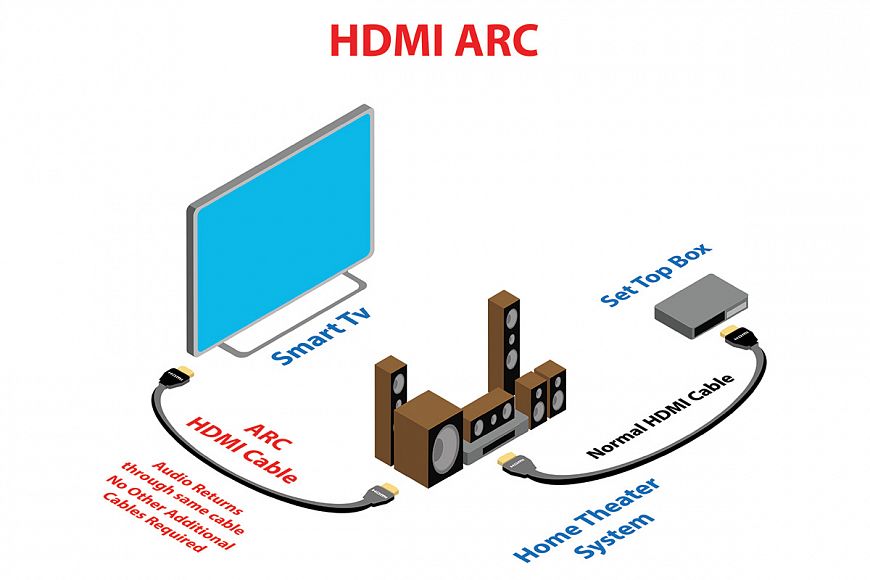
Расширение стандарта HDMI, названное ARC (Audio Return Channel), в строгом соответствии со своим названием позволяет транслировать звуковое сопровождение в обратном направлении – от телевизора на AV-ресивер или саундбар. Зачем вдруг это может понадобиться, как этим пользоваться и чем отличается ARC от eARC мы расскажем в этой статье.

Интерфейс HDMI (High Definition Multimedia Interface), представленный почти двадцать лет назад, стал практически стандартом де-факто для коммутации AV-техники. Прежде всего, его используют для передачи «в цифре» видео высокого разрешения, однако, с момента своего рождения стандарт включал и возможность трансляции аудиодорожки. Правда, передача данных изначально допускалась лишь в одном направлении – от источника контента на AV-ресивер, телевизор или проектор. Со временем (в 2009 году) появилось расширение стандарта HDMI, названное ARC (Audio Return Channel), которое позволяет транслировать звуковое сопровождение в обратном направлении – от телевизора на AV-ресивер или саундбар. Какую задачу решали разработчики в процессе работы над этим расширением? Для чего нужно передавать аудио от телевизора? Давайте разбираться.

Телевизор как эпицентр домашней развлекательной системы
Классическая структура системы домашнего кинотеатра включает источник контента, которым может быть проигрыватель дисков Blu-ray, UltraHD Blu-ray или DVD, сетевой мультимедийный плеер или игровая консоль, многоканальный процессор с усилителями мощности или ресивер и устройство отображения – телевизор или проектор. При этом, в большинстве случаев сигнал в такой системе следует в одном направлении – от источника видеоряд и звуковая дорожка передаются на процессор или ресивер, в котором данные, относящиеся к аудио, отделяются и поступают на декодирование, а видео либо сквозным образом транслируются на телевизор или проектор, либо предварительно обрабатываются видеопроцессором ресивера. И, на первый взгляд, никакого реверса здесь не требуется. Но это только на самый первый взгляд.

Прежде всего вспомним, что телевизор всегда был не только устройством отображения, но и источником контента. На борту любого телевизора присутствуют различные тюнеры (аналоговые и цифровые) для приема телепрограмм – именно это отличает телевизор от монитора. Кроме того, современные телевизоры практически все способны подключаться с домашней компьютерной сети и оснащаются встроенными мультимедийными проигрывателями. Ну и, наконец, многие модели используют различные платформы Smart TV, предлагающие широчайший спектр самого разнообразного контента. И, несмотря на то, что внешние мультимедийные плееры зачастую обеспечивают картинку более высокого качества, а их функционал часто бывает богаче встроенных в телевизоры решений, основная масса пользователей вполне удовлетворены интегрированными в телевизор возможностями и выбирают именно этот вариант за удобство.
Но если телевизор стал источником контента, то стройная схема коммутации, описанная выше, требует адаптации под новые вводные. То есть, если вас удовлетворяет звучание динамиков, встроенных в телевизор, то никаких проблем нет. Правда, зачем тогда городить вокруг него продвинутую многоканальную аудиосистему или ставить саундбар – очевидно, что так поступают в случае, если хотят радикально улучшить качество звучания телевизора. А значит появляется необходимость передавать аудио от телевизора на процессор, ресивер или саундбар. До появления расширения ARC стандарта HDMI для решения этой задачи использовали цифровой оптический интерфейс Toslink. Все телевизоры в обязательном порядке имели цифровой выход Toslink, который подключался к соответствующему входу AV-процессора, ресивера или саундбара. Кстати, несмотря на массовое распространение HDMI ARC, до сих пор для обеспечения совместимости со старой техникой наличие выходных оптических портов обязательно для любого телевизора.

HDMI ARC – на все случаи жизни
Добавление возможности обратной трансляции аудиопотока в стандарт HDMI позволило уменьшить количество необходимых кабелей в системе, отказавшись от оптического соединителя. В принципе, теперь для подключения устройства отображения необходим единственный кабель HDMI, по которому телевизор получает «картинку», и по этому же кабелю передает при необходимости обратно звук. Чтобы все заработало как надо, необходимо, чтобы стандарту HDMI ARC соответствовали порты и на телевизоре, и на процессоре, ресивере или саундбаре. В большинстве современных моделей AV-техники есть хотя бы один порт, удовлетворяющий этим требованиям.

В спецификации ARC для обратной трансляции аудиопотока выделена полоса 1 Мбит/сек., что позволяет передавать пяти- и семиканальное аудио в стандартах Dolby Digital и DTS, а также стерео в несжатом формате PCM. Главным недостатком ARC считается фактическая необязательность его реализации в полном объеме. То есть, в какой степени декларируемый в стандарте функционал будет реализован в конкретном устройстве определяет производитель. В результате конкретная модель телевизора может передавать по обратному каналу, например, только сигнал Dolby Digital или только PCM.
HDMI eARC – светлое будущее коммутации
А что же завтра? Современной версией обратного аудиоканала стал eARC (Enhanced Audio Return Channel), который включен как неотъемлемая часть в стандарт HDMI 2.1. Главным новшеством расширенного обратного аудиоканала стала существенно более широкая полоса пропускания – скорость передачи аудиопотока для eARC составляет уже 38 Мбит/сек., что позволяет транслировать восемь каналов несжатого аудио с параметрами 24 бит/192 кГц. То есть, обратный канал eARC способен передавать саундтреки в новейших форматах Dolby TrueHD, DTS-HD Master Audio, Dolby Atmos и DTS:X, а также многоканальное аудио LPCM с параметрами 24 бит/192 кГц, в котором часто записан саундтрек на дисках Blu-ray и UltraHD Blu-ray с концертными программами. Плюс в стандарт HDMI, наряду с eARC, наконец интегрируется протокол CEC, позволяющий использовать один пульт ДУ для управления несколькими компонентами системы. К примеру, с помощью пульта телевизора регулировать громкость саундбара.

Расширение ARC стандарта HDMI стало логичным развитием функционала интерфейса, необходимым для сохранения реноме универсального стандарта коммутации компонентов развлекательных систем. И его усовершенствованная версия eARC работает на решение той же задачи, поддерживая актуальность HDMI на новом витке технического прогресса.


Системы DME используются во всем мире с использованием стандартов, установленных Международной организацией гражданской авиации (ИКАО), RTCA, Агентством авиационной безопасности Европейского союза (EASA) и другими организациями. Некоторые страны требуют, чтобы воздушные суда, выполняющие полеты по приборам (ППП), были оснащены запросчиком DME; в других случаях запросчик DME требуется только для выполнения определенных операций.
Маломощные транспондеры DME также связаны с некоторыми установками системы посадки по приборам (ILS), курсового радиомаяка ILS и микроволновой системы посадки (MLS). В таких ситуациях частота / интервал между импульсами транспондера DME также сочетается с частотой ILS, LOC или MLS.
ИКАО характеризует передачи DME как сверхвысокие частоты (UHF). Также используется термин L-диапазон.
СОДЕРЖАНИЕ
Операция
В своей первой итерации самолет, оборудованный DME, использовал это оборудование для определения и отображения своего расстояния от наземного транспондера путем отправки и приема пар импульсов. Наземные станции обычно размещаются вместе с VOR или VORTAC. Маломощный DME может быть совмещен с ILS или MLS, где он обеспечивает точное расстояние до точки приземления, аналогично тому, которое в противном случае обеспечивается маркерными маяками ILS (и, во многих случаях, позволяя удалить последние).
Типичный наземный ретранслятор DME для навигации по маршруту или терминала будет иметь пиковый импульсный выход 1 кВт на назначенном канале УВЧ.
Аппаратное обеспечение

Система DME состоит из передатчика / приемника (запросчика) УВЧ (диапазона L) в воздушном судне и приемника / передатчика ( ретранслятора ) УВЧ (диапазона L ) на земле.
Сроки
Режим поиска
Режим трека
Менее 30 опросных пар импульсов в секунду, так как среднее количество импульсов в ПОИСКЕ и ТРЕКЕ ограничено максимум 30 парами импульсов в секунду. Бортовой запросчик фиксируется на наземной станции DME, как только он распознает, что конкретная последовательность ответных импульсов имеет тот же интервал, что и исходная последовательность запроса. Как только приемник заблокирован, он имеет более узкое окно для поиска эхо-сигналов и может удерживать блокировку.
Расчет расстояния
Радиосигналу требуется около 12,36 микросекунд, чтобы пройти 1 морскую милю (1852 м) до цели и обратно. Разница во времени между запросом и ответом за вычетом 50 микросекунд задержки наземного транспондера и ширины импульса ответных импульсов (12 микросекунд в режиме X и 30 микросекунд в режиме Y) измеряется схемой синхронизации запросчика и преобразуется в измерение расстояния. ( наклонная дальность ) в морских милях, затем отображается на дисплее DME в кабине.
Точность
Точность наземных станций DME составляет 185 м (± 0,1 морских миль ). Важно понимать, что DME определяет физическое расстояние между антенной самолета и антенной транспондера DME. Это расстояние часто называют «наклонной дальностью» и тригонометрически зависит от высоты самолета над транспондером, а также от расстояния между ними на земле.
Например, самолет, находящийся непосредственно над станцией DME на высоте 6076 футов (1 морская мили), по-прежнему будет показывать 1,0 морскую милю (1,9 км) на показаниях DME. Технически самолет находится в миле от нас, всего в миле по прямой. Наклонная ошибка дальности наиболее заметна на больших высотах вблизи станции DME.
ИКАО рекомендует точность меньше суммы 0,25 морских миль плюс 1,25% от измеренного расстояния.
Технические характеристики
Данные радиочастоты и модуляции
Частоты DME связаны с частотами VOR, и запросчик DME предназначен для автоматической настройки на соответствующую частоту DME при выборе соответствующей частоты VOR. Запросчик DME самолета использует частоты от 1025 до 1150 МГц. Транспондеры DME передают по каналу в диапазоне от 962 до 1213 МГц и принимают по соответствующему каналу в диапазоне от 1025 до 1150 МГц. Полоса частот разделена на 126 каналов для запроса и 126 каналов для ответа. Частоты запроса и ответа всегда различаются на 63 МГц. Разнос всех каналов составляет 1 МГц при ширине спектра сигнала 100 кГц.
Технические ссылки на каналы X и Y относятся только к интервалу между отдельными импульсами в паре импульсов DME, интервалу 12 микросекунд для каналов X и интервалу 30 микросекунд для каналов Y.
Типы транспондеров DME
Федеральное управление гражданской авиации США установило три типа транспондеров DME (не считая тех, которые связаны с системой посадки): терминальные транспондеры (часто устанавливаемые в аэропорту) обычно обеспечивают обслуживание на минимальной высоте над землей 12000 футов (3700 м) и дальности действия 25 морских мили (46 км); Транспондеры на малой высоте обычно обеспечивают обслуживание на минимальной высоте 18 000 футов (5 500 м) и дальности действия 40 морских миль (74 км); и высотные транспондеры, которые обычно обеспечивают обслуживание на минимальной высоте 45 000 футов (14 000 м) и дальности действия 130 морских миль (240 км). Однако многие из них имеют эксплуатационные ограничения, в значительной степени основанные на блокировании прямой видимости, и фактические характеристики могут отличаться. В Руководстве по аэронавигационной информации США говорится, предположительно в отношении высотных транспондеров DME: «надежные сигналы могут приниматься на расстояниях до 199 морских миль [369 км] на высоте прямой видимости».
Приемоответчики DME, связанные с системой захода на посадку по ILS или другим приборам, предназначены для использования во время захода на посадку на конкретную ВПП, на одном или обоих концах. Они не авторизованы для общей навигации; ни минимальный диапазон, ни высота не указаны.
Использование частот / распределение каналов
Назначены не все определенные каналы / частоты. Существуют «дыры» назначения с центрами 1030 и 1090 мегагерц для обеспечения защиты системы вторичного обзорного радара (SSR). Во многих странах есть также «дыра» в назначении с центром в 1176,45 мегагерц для защиты частоты GPS L5. Эти три «дыры» удаляют примерно 60 мегагерц из доступных для использования частот.
Прецизионный DME (DME / P), компонент СВЧ-системы посадки, назначается Z-каналам, которые имеют третий набор интервалов между импульсами опроса и ответа. Каналы Z мультиплексируются с каналами Y и существенно не влияют на план каналов.
Будущее
В 2020 году одна компания представила свой DME пятого поколения. Хотя эта итерация совместима с существующим оборудованием, эта итерация обеспечивает большую точность (до 5 метров с использованием триангуляции DME / DME) с дальнейшим уменьшением до 3 метров с использованием дальнейшего уточнения. Трехметровое оборудование рассматривается как часть европейского проекта SESAR с возможным развертыванием к 2023 году.
В двадцать первом веке воздушная навигация все больше полагается на спутниковое наведение. Однако наземная навигация будет продолжаться по трем причинам:



