БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
Бесколлекторные двигатели постоянного тока (BLDC — Brushless DC electric motor) часто используется в мотор-колесе электросамокатов и электровелосипедов. Его первые версии появились в 1960-х годах. Двигатели BLDC намного эффективнее и имеют гораздо больший крутящий момент.

Размещение постоянного магнита в роторе (внутренняя конфигурация) и управление окружающими катушками через транзисторы, позволило устранить самый важный недостаток щеточных (коллекторных) двигателей постоянного тока, которым являются сами щетки.
В альтернативной конфигурации (внешний ход) катушки якоря могут образовывать твердый сердечник, вокруг которого вращается ротор с постоянным магнитом, приводящий в движение вал двигателя. В обоих случаях катушки неподвижны.
Двигатели BLDC считаются двигателями с электронной коммутацией (ECM) в отличие от щеточных двигателей с механической коммутацией.

Общий принцип управления двигателем BLDC
Для двигателей BLDC требуются современные электронные контроллеры, которые могут определять положение ротора. Для этой цели можно использовать датчик Холла, реагирующий на положение каждой из катушек якоря при работающем двигателе. Скорость двигателя BLDC больше не может регулироваться напряжением, как в щеточных двигателях, а только путем изменения частоты переключения. Эти двигатели питаются от сигнала ШИМ, как показано на рисунке.
Двигатели BLDC делятся на 1-фазные, 2-фазные и 3-фазные, но принцип работы является общим для всех типов. Вместо механического коммутатора, изменяющего направление магнитного поля катушек ротора, используются транзисторы, которые непрерывно изменяют фазу напряжения подаваемого на катушку статора, что заставляет ротор непрерывно вращаться.
Управление однофазными двигателями BLDC
Однофазные двигатели BLDC имеют две параллельные обмотки якоря, управляемые напряжением ШИМ через мост H. Выходной сигнал одного датчика Холла постоянно меняет полярность тока, протекающего через обмотку якоря, таким образом поддерживая непрерывное вращение ротора. Однофазные двигатели BLDC очень просты в управлении. Для их работы достаточно одной интегральной микросхемы, например LB11970RV (однофазный двухполупериодный драйвер).

Принцип управления однофазным двигателем BLDC
Управление двухфазными двигателями BLDC

Двухфазные двигатели немного сложнее в управлении. Якорь состоит из 4 катушек, а магнитное поле создается 4 парами постоянных магнитов. Катушки якоря сгруппированы попарно, поэтому двухфазные двигатели имеют больший крутящий момент, чем однофазные.
Двухфазные двигатели обычно используются в некритических низкоуровневых устройствах, таких как большие вентиляторы, поэтому там не требуются сложные контроллеры. В результате двухфазные двигатели мощнее и дешевле. Драйверы, такие как например LB1668M, могут использоваться для их управления.
Управление 3-фазными двигателями BLDC
Трехфазные двигатели BLDC имеют 3 катушки якоря, соответствующие 6 состояниям коммутации. В каждую из катушек обычно помещают датчики Холла, которые реагируют на прохождения над ними постоянных магнитов, которые являются элементами ротора. Принцип использования сигналов от датчиков Холла показан на рисунке.

Конструкция двигателя BLDC с датчиками Холла
Тут тоже сигналы от датчиков Холла определяют моменты переключения. Эти сигналы через соответствующую систему подключения включают транзисторы, которые напрямую управляют катушками двигателя. Конечно, переключение в трехфазных двигателях происходит в 3 раза быстрее, чем в однофазных. Это приводит к снижению вибрации (дёргания) и более точному контролю скорости. Примером трехфазного драйвера двигателя BLDC с датчиками Холла является микросхема LB1976.

Принцип управления мотором BLDC с использованием датчиков Холла
Двигателями также можно управлять без датчиков Холла, используя сигнал BEMF (Back EMF) от каждой катушки. Этот сигнал получается путем сравнения напряжения, индуцированного в каждой из трех катушек, с центральным напряжением (точка COM). Результат такой связи усиливается и передается в систему определения положения ротора.
Сигналы от трех катушек преобразуются в формы импульсов, сдвинутых друг относительно друга на 120 °. Некоторые контроллеры используют простые компараторы для определения фазы каждой обмотки, другие требуют использования внешних микроконтроллеров. Трехфазный интегрированный бессенсорный контроллер LB11983 включает в себя датчик положения ротора со схемами запуска, синхронизации, переключения, тепловой защиты и контроля насыщения и не требует внешнего микроконтроллера.
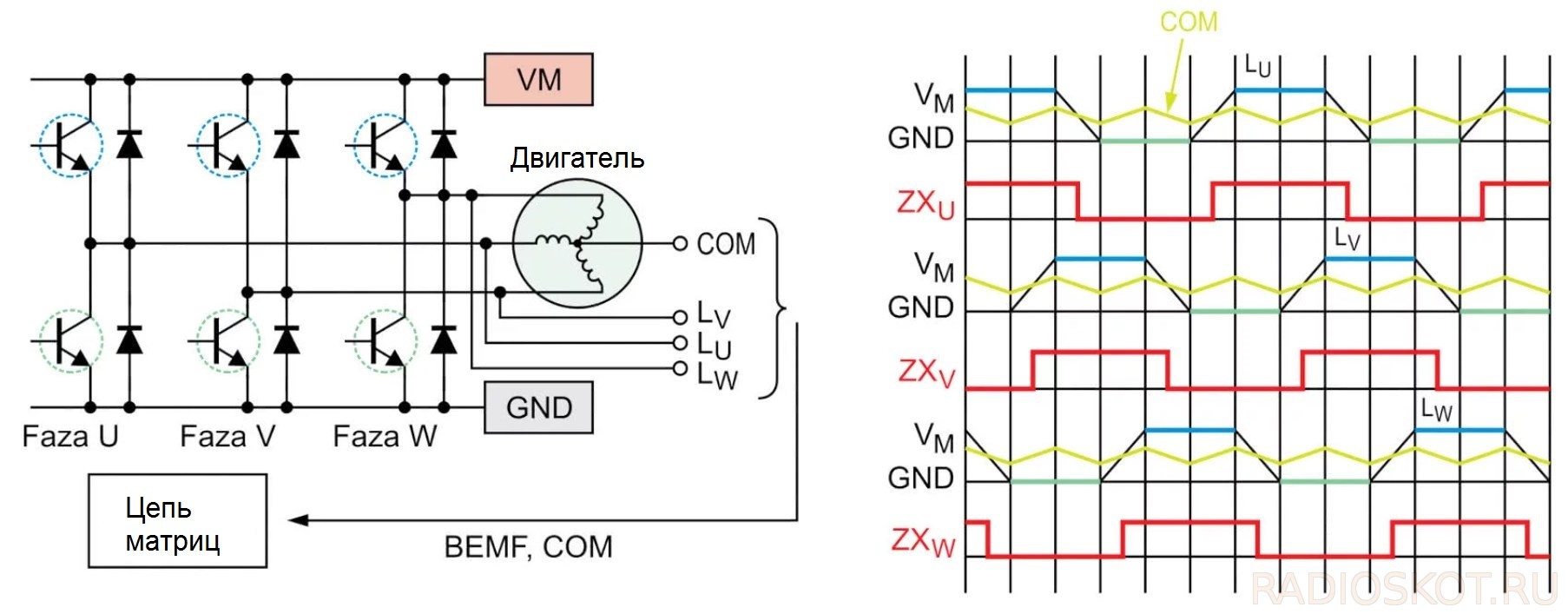
Принцип управления двигателем BLDC с помощью сигнала BEMF
Драйверы двигателей BLDC, использующие сигналы BEMF, имеют проблему с определением положения ротора во время запуска, потому что эти сигналы еще не генерируются. В этом случае двигатель запускается с неизвестного положения, то есть неизвестно положение статора относительно ротора. Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.
Форум по обсуждению материала БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
 Медицинские устройства для контроля параметров здоровья человека. Примеры современных микросхем снятия и обработки сигналов тела.
Медицинские устройства для контроля параметров здоровья человека. Примеры современных микросхем снятия и обработки сигналов тела.
 Классический фонарик со встроенным зарядным устройством можно неплохо улучшить, добавив пару микросхем и 18650 АКБ.
Классический фонарик со встроенным зарядным устройством можно неплохо улучшить, добавив пару микросхем и 18650 АКБ.
Чипгуру
Сообщение #1 Strock » 23 фев 2018, 16:09
Я в этом полный дуб, потому хотелось для себя разобраться, понять и научится строить БК моторы.
Тема создана в связи с наличием велика, статора, подходящего для создания БК мотора и желания установить последний на велосипед.
Надеюсь на ваше понимание и помощь! Вместе, думаю, разберемся, а выкладки по этой теме могут пригодится многим 

Сообщение #2 T-Duke » 23 фев 2018, 16:27
Как тот, кто уже много лет занимается этой тематикой, хочу сказать, что нужно еще правильно классифицировать моторы.
Английская аббревиатура BLDC говорит, что это просто Двигатель постоянного тока без щеток. Иными словами это бесколлекторный двигатель в понимании механического коллектора. Но без коллектора много типов двигателей с постоянными магнитами.
Следует отметить, что как правило на рынке не BLDC двигатели, а PMSM двигатели. Разница у них в конструкции магнитной системы. Именно BLDC двигатели заточены под работу с блочной коммутацией. У них рывки при переходе полюсов меньше. Если же запустить в блочном режиме синусоидальный двигатель, то он дергает сильнее, чем исконный BLDC. То есть пульсация крутящего момента у него выше. На видео как раз двигатель типа PMSM работающий в режиме BLDC двигателя.
Но конечно двигатели работают в обеих режимах. Мне лично нравится синусоидальный плавный режим работы. Именно это направление я и развивал для себя.
Трёхфазный бесколлекторный двигатель
1. Двигатель стиральной машины с прямым приводом
Пожалуй уже каждый слышал о стиральных машинах с прямым приводом барабана. Но до сих пор, даже не все специалисты по ремонту стиральных машин знают как устроен и как работает двигатель в такой машине.
Сама идея конечно не новая, ведь за основу взят шаговый двигатель, который уже давно получил распространение во многих электротехнических устройствах. А вот первое применение его в конструкции стиральной машины в качестве привода барабана, принадлежит корейскому концерну LG. С середины 2005 года, компания LG начала активно продвигать свою продукцию, заявляя о 10-ти летней гарантии на двигатель для стиральных машин с прямым приводом.
Сегодня, помимо LG, компании Samsung, Haier и Whirpool в ряде моделей стиральных машин стали применять подобные двигатели. Забегая вперёд, можно сказать, что компания LG не просчиталась и двигатель для прямого привода барабана действительно довольно надёжный и имеет преимущество по сравнению с более традиционным и распространённым коллекторным двигателем.
2. Устройство двигателя
Такой двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Различают два вида подобных двигателей:
Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. В стиральных машинах с прямым приводом применяется Outrunner тип двигателя.
В этой статье мы ознакомим с устройством двигателя от стиральной машины LG.
3. Ротор
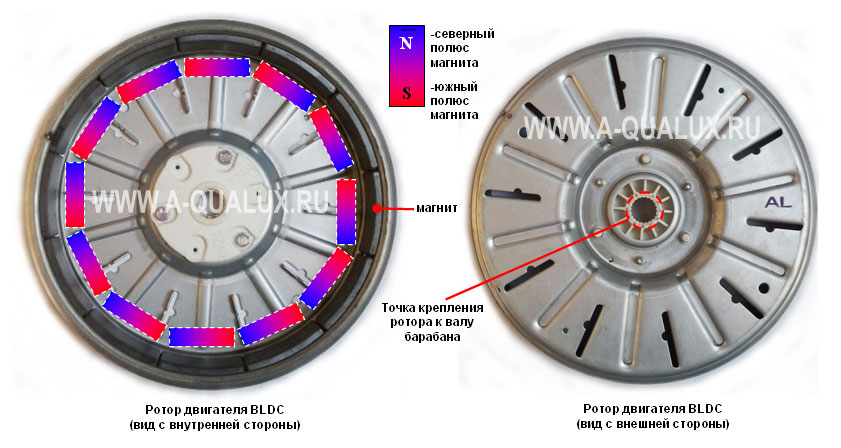
Рис.2 Ротор двигателя стиральной машины LG с прямым приводом
4. Статор
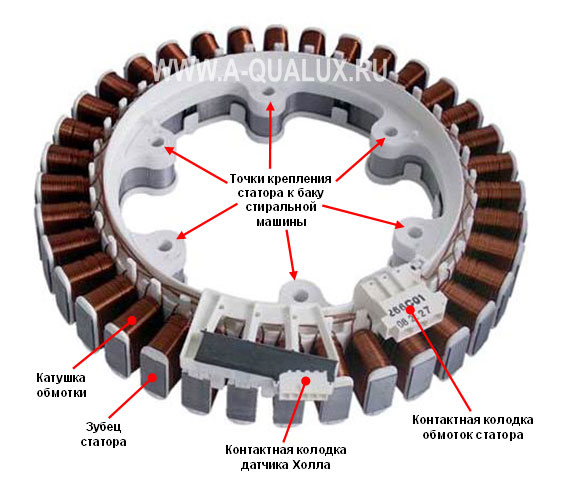
Рис.3 Статор двигателя стиральной машины LG с прямым приводом
Поскольку в каждый момент времени работают только две фазы (при включении звездой), магнитные силы воздействуют на ротор неравномерно по всей окружности (Рис.5).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее (Рис.6)
 |
Рис.4 Соединение обмоток по схеме «звезда»

Рис.5 Воздействие магнитных сил на ротор

В двигателе стиральной машины LG, распределение фазных обмоток, а также относительное положение ротора и статора можно увидеть ниже (см. Рис.7). На схеме производителя, фазные обмотки обозначают буквами : V, W, U

Рис.7 Трёхфазный двигатель постоянного тока (BLDC) стиральной машины LG (общий вид)
Для контроля положения ротора применяется датчик работающий на эффекте Холла. Датчик реагирует на магнитное поле и поэтому его располагают на статоре таким образом, чтобы магниты ротора воздействовали на него.
5. Система управления трёхфазным двигателем (BLDC)
Стоит отметить, что система управления двигателем BLDC и схема её реализации аналогична схеме управления трёхфазным асинхронным двигателем описанной в другой нашей статье. Что бы в точности не повторяться, поясним всё же немного по другому.
Двигатель постоянного тока имеет три вывода (т.е. три фазы), на которые в разный момент времени подаётся «+» и «-» питания. Это реализуется при помощи IGBT (биполярных транзисторов с изолированным затвором) представляющие электронные силовые ключи, включённые по мостовой схеме (Рис.8)

Рис.8 Условная схема силовой части инвертора и обмоток двигателя подключённых по схеме «звезда»
При включении ключей, как показано выше, на двигатель подается полное напряжение питания. При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем, нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ).
На (Рис.9) представлен график, иллюстрирующий применение трёхуровневой ШИМ для управления электродвигателем, которая используется в приводах асинхронных электродвигателей с переменной частотой. Напряжение от ШИ-модулятора, подаваемое на обмотку двигателя показано в виде прямоугольных импульсов. Пунктирной линией грубо изображён магнитный поток в статоре двигателя. Магнитный поток имеет приблизительно синусоидальную форму, благодаря соответствующему закону ШИМ.
Поэтому, ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью. Таким образом, изменяется действующее напряжение от нулевого до напряжения питания.
Назревает вопрос: зачем нужно менять скважность, зачем эта частота и для чего это всё нужно? Дело в том, что слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования оборотов двигателя.

Рис.9 График иллюстрирующий напряжение от ШИ-модулятора, подаваемое на обмотку двигателя.
Например: если ротор двигателя имеет два полюса, то при одном полном обороте магнитного поля на статоре, ротор совершает один полный реальный оборот.
При 4 полюсах, чтобы повернуть вал двигателя на один полный оборот потребуется два оборота магнитного поля на статоре. Чем больше количество полюсов ротора, тем больше потребуется электрических оборотов для вращения вала двигателя на один оборот.
В нашем случае, имеется 12 магнитов на роторе. Для того, чтобы провернуть ротор на один оборот, потребуется 12/2=6 электрических оборотов поля. Поэтому, учитывая особенность конструкции двигателя и инверторную систему управления, для питания фаз двигателя необходима электрическая частота значительно выше 50Гц.
Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ, на сигналы, подаваемые на ключи. Для этого, микроконтроллер электронного блока управления, программно формирует ШИМ для каждого из ключей (IGBT). В программу контроллера, производитель закладывает определённый алгоритм и все данные для управления конкретным двигателем.
6. Неисправности и диагностика двигателя
Как и говорилось выше, сам по себе двигатель довольно надёжный, относительно простой и в практике известны единичные случаи выхода из строя обмоток статора. Магниты на статоре имеют конечно не самое высшее качество, но их отклеивание или расколы почти не встречались.
Уязвимая деталь, пожалуй только датчик Холла. При возникновении его неисправности, отсутствует сигнал положения ротора, что приводит к некорректной работе системы питания фаз двигателя. В этом случае можно наблюдать, как ротор двигателя стопорится и издаёт дребезжащий металлический звук. В стиральных машинах LG, эта проблема зачастую сопровождается кодом неисправности «SE» на модуле интерфейса.
В отличие от коллекторного двигателя, запустить и проверить трёхфазный двигатель напрямую вне стиральной машины без каких-либо специальных приспособлений не получится, поскольку статор крепится к баку, а ротор к валу барабана стиральной машины. Поэтому, при наличии обычного цифрового мультиметра, можно проверить только сопротивление обмоток фаз статора. В связи с этим, на практике, при диагностировании неисправности, проблемную деталь двигателя или модуль управления, выявляют путём замены детали на заведомо исправную.
7. Преимущества и недостатки BLDC двигателей
Более ярким получится сравнение трёхфазного двигателя (BLDC) с традиционным коллекторным двигателем, которым оснащено большинство стиральных машин.
К преимуществу двигателей BLDC стоит отнести:
К недостаткам двигателя BLDC относятся:
Справедливости ради, стоит отметить, что двигатель стиральной машины LG с прямым приводом не идеально бесшумный. В момент пуска двигателя, из-за взаимодействия магнитных полей статора с магнитами ротора, возникают колебания последнего, сопровождающиеся характерным металлическим звоном. По мере увеличения оборотов ротора, звук становится более мягким, но всё-равно своеобразным и характерным для всех стиральных машин LG с прямым приводом барабана.
Подключение бесколлекторного электродвигателя постоянного тока (BLDC) к Arduino

В этой статье мы рассмотрим управление скоростью вращения бессенсорного бесколлекторного электродвигателя постоянного тока A2212/13T (Sensorless BLDC outrunner motor), часто используемого для конструирования дронов, с помощью ESC (Electronic Speed Controller – электронный контроллер скорости) и платы Arduino.
Необходимые компоненты
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.

Примечание : существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Почему дроны и вертолеты используют именно BLDC двигатели?
Сейчас существует множество различных типов дронов – с двумя лопастями, с четырьмя лопастями и т.д. Но все они используют именно BLDC двигатели. Почему именно их, ведь BLDC двигатели стоят дороже чем обычные электродвигатели постоянного тока?

Существует несколько причин для этого:
Зачем нужен контроллер ESC
Как мы уже знаем, для функционирования BLDC двигателей необходим какой-нибудь контроллер, который преобразует напряжение постоянного тока от батарейки в последовательность импульсов, подаваемую в определенном порядке на провода (фазы) двигателя. Этот контроллер называется ESC (Electronic Speed Controller – электронный контроллер скорости). Основной обязанностью данного контроллера является правильная подача питания на провода BLDC двигателя чтобы двигатель вращался в нужном направлении. Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.

Некоторые термины, используемые в тематике BLDC и ESC
При изучении принципов работы BLDC двигателей и контроллеров ESC вы можете столкнуться с некоторыми терминами, используемыми в данной тематике. Кратко рассмотрим основные из этих терминов.
Braking (торможение) – определяет насколько быстро BLDC двигатель может остановить свое вращение. Это особенно актуально для летающих средств (дронов, геликоптеров и т.д.) поскольку они вынуждены часто изменять количество оборотов двигателя в минуту чтобы маневрировать в воздухе.
Soft Start (плавный пуск, старт) – эта способность особенно важна для BLDC двигателей когда вращающий момент от него на исполнительный механизм (колесо, винт и т.д.) передается через механизм передач, обычно состоящий из шестерен. Плавный пуск означает, что двигатель не начнет сразу вращаться с максимальной скоростью, а будет увеличивать свою скорость вращения постепенно независимо от того, с какой скоростью нарастает управляющее воздействие. Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
Motor Direction (направление вращения двигателя) – обычно направление вращения BLDC двигателей не изменяется в процессе эксплуатации, однако во время сборки и тестирования работы изделия может потребоваться изменение направления вращения двигателя, обычно это можно сделать просто поменяв местами любые два провода двигателя.
Работа схемы
Схема подключения BLDC двигателя и контроллера ESC к плате Arduino представлена на следующем рисунке.
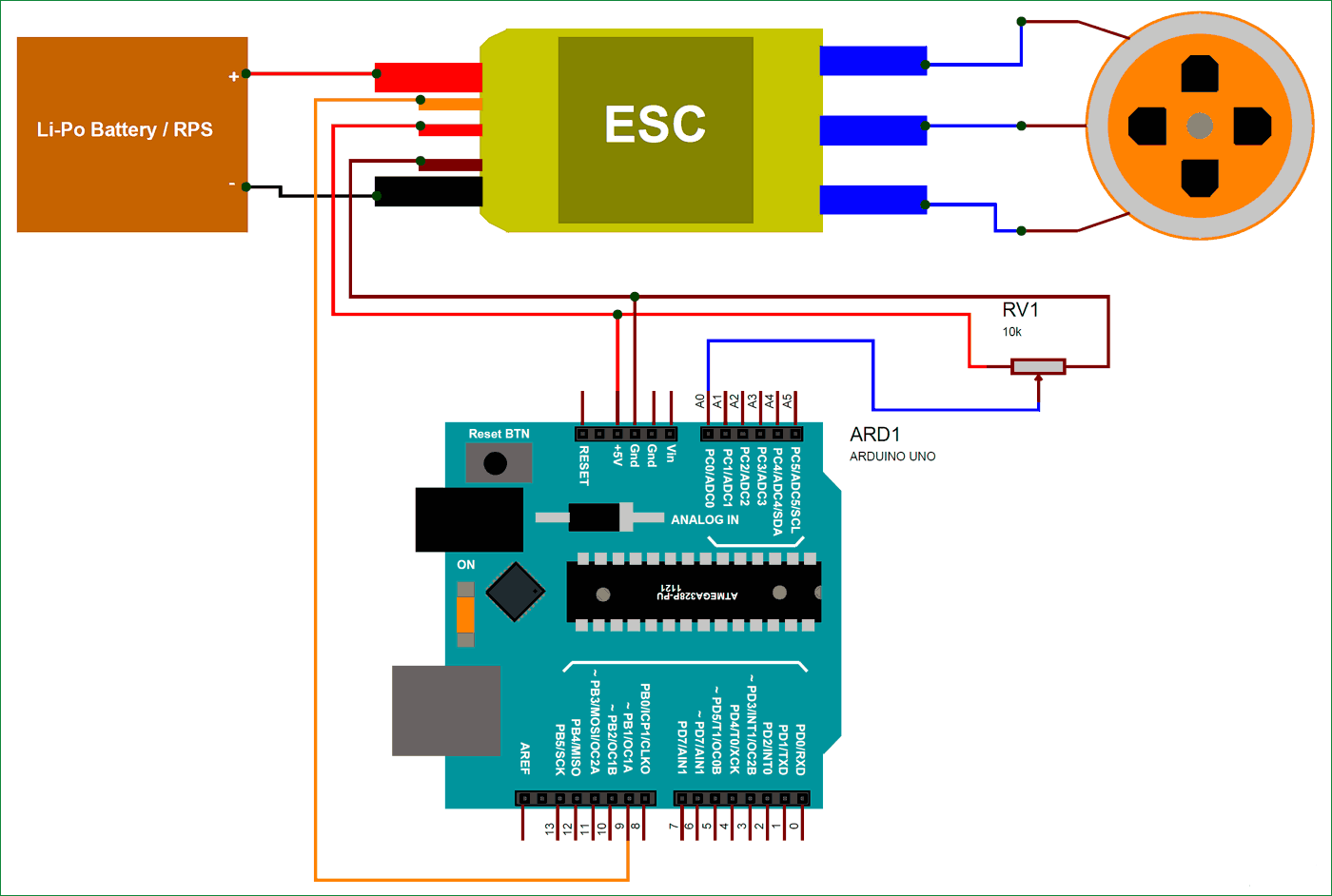
Как видите, схема достаточно проста. Контроллеру ESC необходим источник питания с напряжением 12V и током как минимум 5A. Для питания схемы можно использовать адаптер или Li-Po батарейку. Три фазы (провода) BLDC двигателя необходимо подсоединить к трем выходным проводам контроллера ESC – неважно в каком порядке.
Предупреждение : у некоторых контроллеров ESC нет выходных проводов, в этом случае вам необходимо будет припаивать провода от BLDC двигателя к контактам контроллера ESC. Обязательно изолируйте эти оголенные места (пайки) с помощью изоляционной ленты потому что через эти провода возможно протекание достаточно больших токов и любое короткое замыкание может привести к повреждению двигателя и контроллера ESC.
Схема BEC (Battery Eliminator circuit) в контроллере ESC будет самостоятельно обеспечивать (регулировать) постоянное напряжение +5V, поэтому его можно непосредственно использовать для питания платы Arduino. Для управления скоростью вращения двигателя в схеме используется потенциометр, подключенный к контакту A0 платы Arduino.
Внешний вид собранной конструкции показан на следующем рисунке.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим только его основные фрагменты.
Для управления BLDC двигателем мы будем формировать ШИМ сигнал с частотой 50 Гц и изменяемым от 0 до 100% коэффициентом заполнения. Значение коэффициента заполнения будет управляться с помощью потенциометра. То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя. Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
ШИМ сигнал можно генерировать только на тех цифровых контактах платы Arduino, которые обозначены символом
. В нашей схеме мы будем управлять контроллером ESC с контакта 9 платы Arduino, поэтому следующей командой мы прикрепим контроллер ESC к этому контакту:



