RCDetails Blog
О коптерах и не только
Скачиваем и устанавливаем автономную версию Betaflight Configurator и Blackbox Explorer

Согласно недавнему анонсу, в скором времени Гугл прекратит поддержку Chrome Apps, что приведет к невозможности работы Betaflight Configurator’а и некоторых других программ для мультикоптеров, использующих эту платформу. В этой статье я покажу решение этой проблемы, дам ссылки на автономные версии программ для наших полетных контроллеров.
С самой первой версии Betaflight Configurator (еще со времен Baseflight и Cleanflight) был расширением для Chrome (Chrome Extension). Мы использовали эту платформу, потому что она совместима с Windows, Linux и Mac OS.
Дополнительная информация: настройка Betaflight
Помимо Betaflight Configurator, также будут затронуты этим и многие другие программы, связанные с нашим хобби, типа BLHeli Configurator и Blackbox explorer. К счастью, разработчики нашли решение, и предлагают использовать автономные версии программ, которые можно запускать без Google Chrome. Эти версии также совместимы с Windows, Linux и Mac OS.
Если эти расширения уже установлены в вашем браузере, то они ещё какое-то время будут работать. Но, как видите, уже нельзя найти их в Chrome Web Store — гугл постепенно закрывает эту платформу, так что чем раньше мы перейдем на автономные версии, тем лучше.
Где скачать Betaflight Configurator и Blackbox Explorer?
Скачав архив на компьютер, распакуйте его, из полученной папки запускайте betaflight-configurator.exe, устанавливать не обязательно.
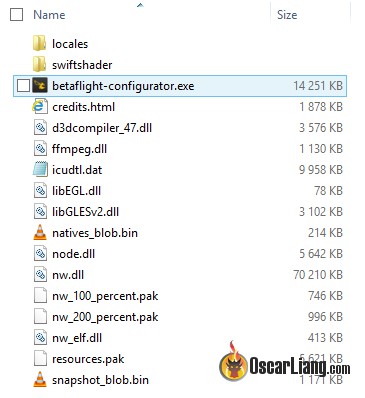
Если будет запрос насчет безопасности файлов, не волнуйтесь, выберите «все равно запустить».
Прим. перев: есть еще один вариант, нужно убрать блокировку с файла, т.к. он скачан из интернета и считается небезопасным. Нажмите правой кнопкой мыши на betaflight-configurator.exe и откройте свойства. Внизу окна будет кнопка «Разблокировать», нажмите её и затем «Ок».
Эту же процедуру нужно проделать с другими программами, кроме Blackbox Explorer у которого уже есть установочный файл, так что просто скачиваем и устанавливаем.
Замечу, что автономные приложения не обновляются автоматически, придется делать это вручную. Для удобства пользователей при появлении новых версий будет появляться всплывающее окно со ссылкой на страницу загрузки.
Не получается установить, появляется предупреждение о небезопасной программе?
Если не получается установить Betaflight configurator как приложение, тогда можно попробовать настроить через Google Chrome.
Первое, клонируем репозиторий GitHub в виде zip архива.
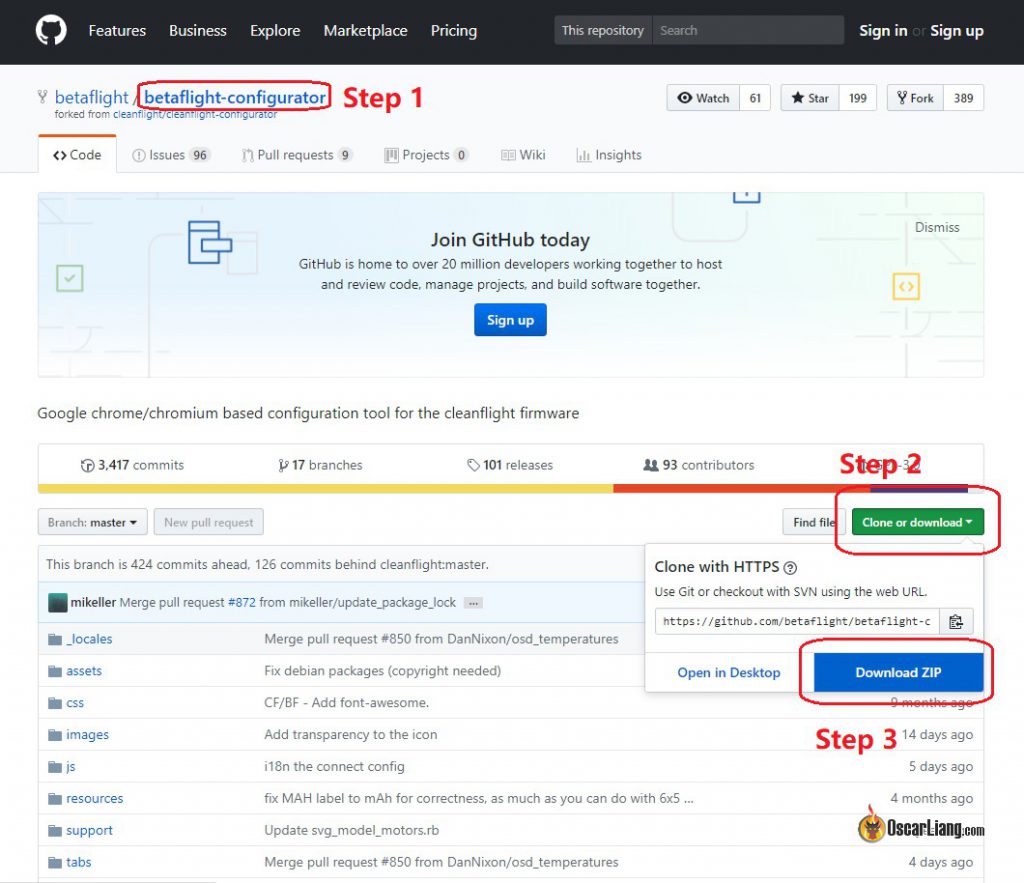
Распаковываем архив, открываем Chrome, переходим на страницу с расширениями, убеждаемся, что режим разработчика включен (developer mode on).
Нажимаем Load Unpacked Extension, выбираем папку, куда мы распаковали архив. На этом всё! Распакованные файлы нужны для работы, так что не удаляйте их.
На выходе мы получаем не отдельное приложение, а расширение Хрома, так что он все еще будет нужен, но зато решается проблема с установкой и с ложными срабатываниями антивирусов.
Скачиваем и устанавливаем автономную версию Betaflight Configurator и Blackbox Explorer : 4 комментария
Здравствуйте, а почему выдает ошибку при установке. И та и та программа?
К сожалению, гадать на кофейной гуще я ещё не научился. Какая ошибка-то?
Blackbox Explorer — ссылка отличается от оригинала и не открывается.
Давно не обновлял статью. Спасибо, все поправил, перевод дополнил.
RCDetails Blog
О коптерах и не только
Основы настройки ПИД контроллера с помощью логов Blackbox

В этом посте я расскажу как я использую Blackbox для настройки ПИД коэффициентов. Несколько основных и простых шагов.
Настройки ПИД – это важная часть любых мультикоптеров и полетов по FPV. Раньше настройка ПИД была игрой в угадывание методом проб и ошибок. Вы настраивали значения ПИД путем выявления любых колебаний как при визуальном полете, так и через FPV.
На мой взгляд добавление Blackbox (черный ящик) в cleanflight сделало процесс настройки ПИДов более научным. Теперь вы можете видеть что является причиной вибраций, и какие значения ПИД регулятора должны быть изменены.
Новичок в этом?
Тут детальная инструкция как настроить Blackbox на вашем коптере.
Если вы не знакомы с ПИД и с основами процесса настройки, прочитайте статью ПИД для мультикоптеров.
Дисклеймер: Я не эксперт, я только делюсь тем что знаю сам. Если у вас есть другие идеи или инструкции, пожалуйста оставьте комментарий. Все ради обмена знаниями.
Про настройку ПИДов есть очень много информации помимо той, что я попробую описать здесь, но я надеюсь, это позволит вам с чего-то начать.
Что сохранять в логах Blackbox
Мой тестовый полет одноминутный и очень простой. Конечно вы можете записать свой обычный полет для анализа:
Анализ данных Blackbox
Основная проверка
До начала проверки ПИД я обычно проверяю мощность на моторах. Нужно убедиться что квадрик летает нормально, иначе данные логов будут неверными.
Я смотрю на данные с теста в висении, мощность на моторах должна быть примерно на одном уровне. Если нет, то обычно есть проблемы:
Если, например, задние моторы потребляют больше, чем передние два мотора, значит зад вашего коптера тяжеловат, возможно потому что аккумулятор слишком сильно смещен назад.
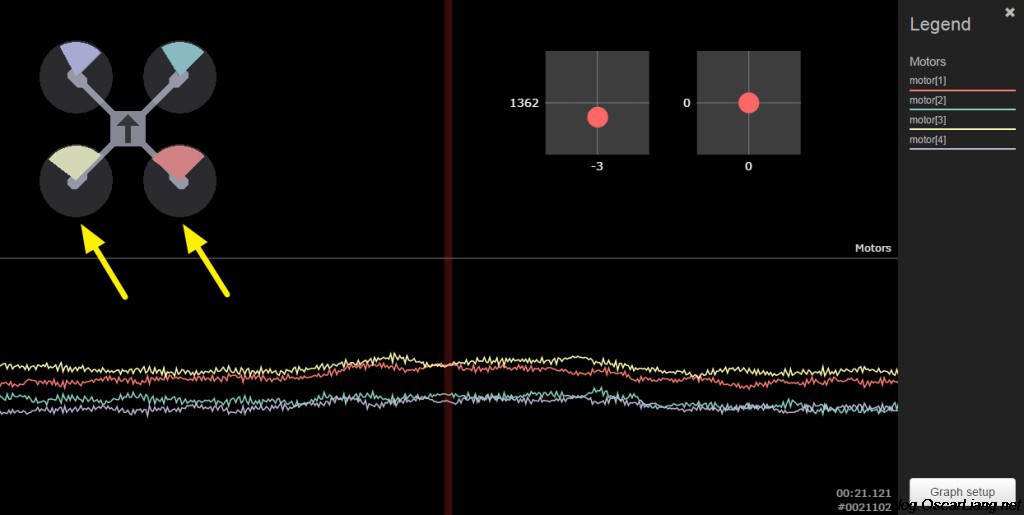
Задние моторы больше нагружены чем передние.
Если только один из моторов нагружен больше чем другие – это говорит о потенциально плохом винте, моторе или даже регуляторе.
Если все 4 мотора вращаются с примерно одинаковой скоростью во время висения, то ваш коптер нормально работает (моторы, регуляторы, винты в порядке), и имеет нормальную центровку. Не обязательно абсолютно одинаково, но достаточно близко будет достаточно.
Моторы нагружены примерно одинаково, меня это устраивает.
Диагностика ПИД
С хорошо подобранными значениями ПИД мы получим:
Обычно я использую 2 графика:
Я прохожусь по этим графикам для крена (Roll), тангажа (Pitch) и рысканья (Yaw) по отдельности.
График 1 показывает где вы двигаете стики и как коптер реагирует на ваши действия (угловое ускорение). Также он показывает, как ваш ПИД регулятор (следующий график) действует на гироскоп.
Следующий график – ПИД, он более важен. Так, по моему мнению, нормальные графики ПИДов должны выглядеть, и так они реагируют на увеличение/уменьшение значений.
Примеры настройки
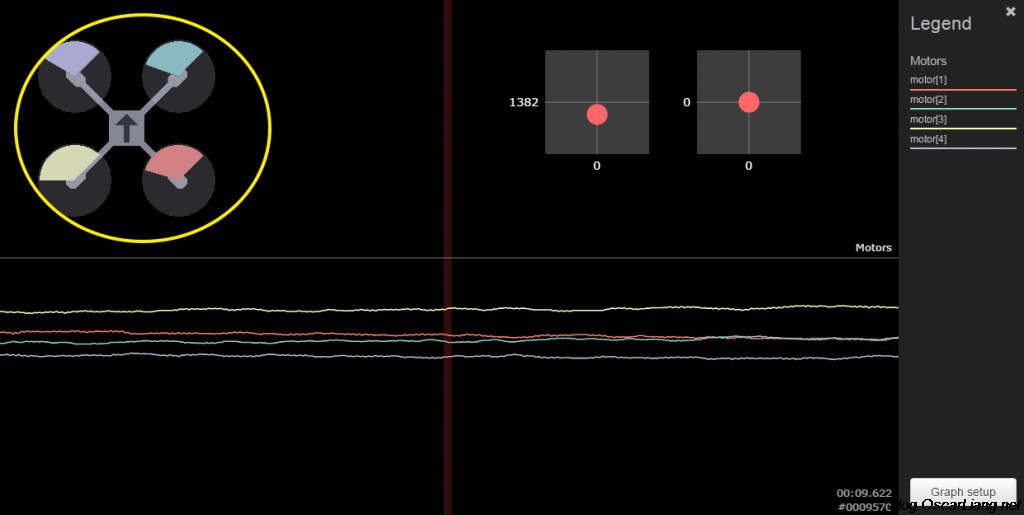
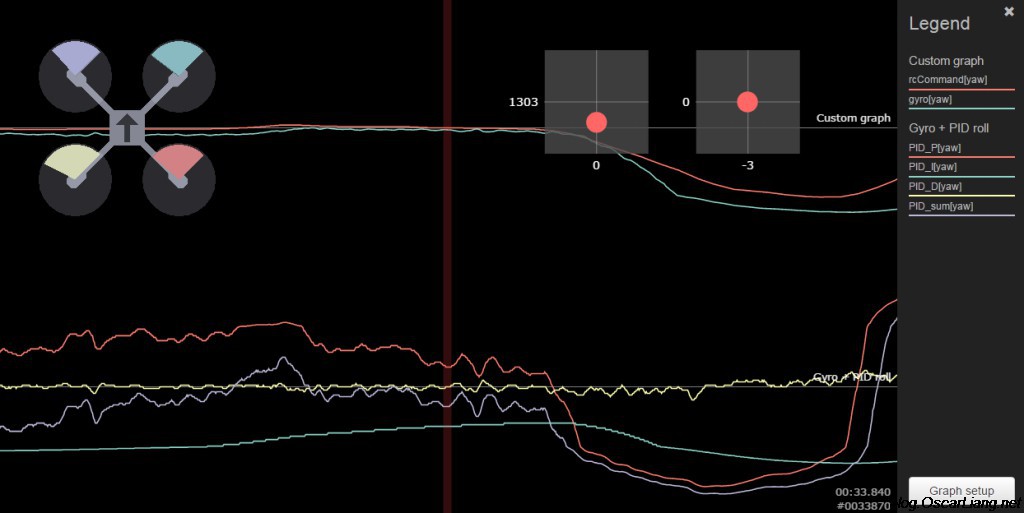
Крен/тангаж (Roll\Pitch), значение P
Очевидно, что значение P в этом примере слишком большое.
Как только я двинул стик по крену, P начал колебаться, и эти волны видны на графике (желтый круг)
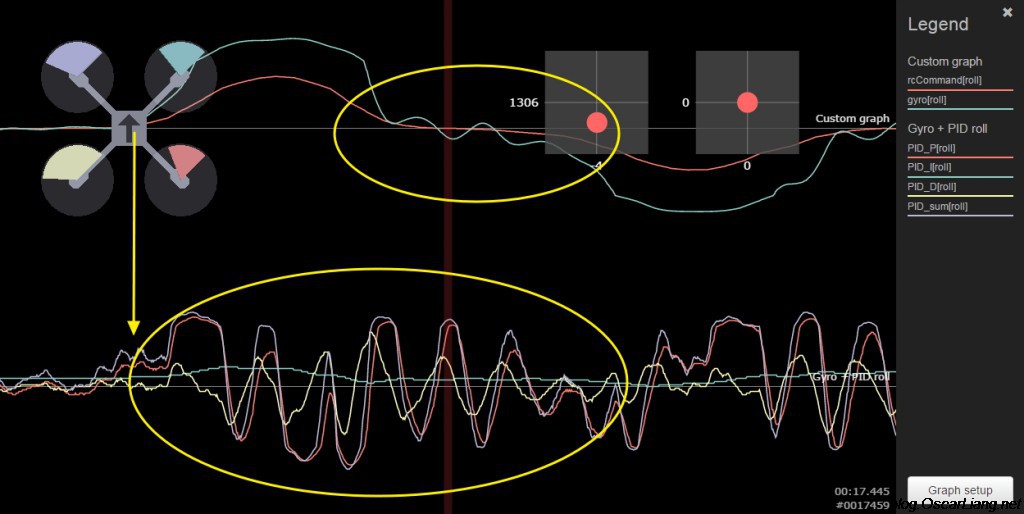
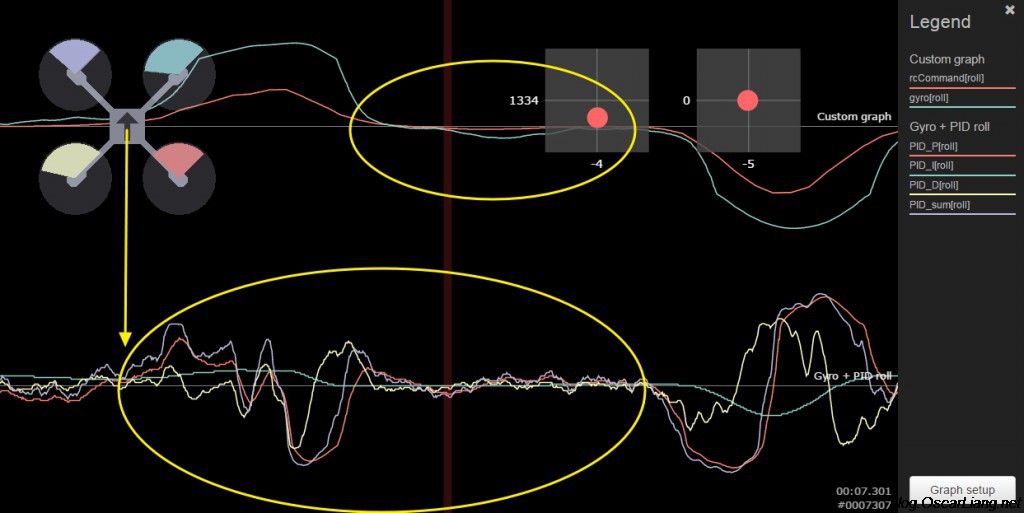
Я должен уменьшить P.
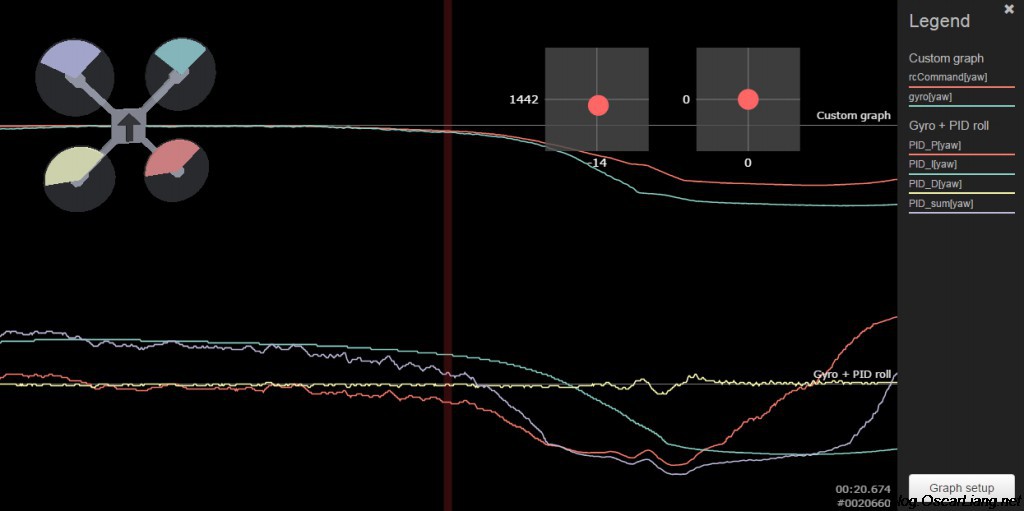
Намного лучше, больше нет постоянных колебаний P и гироскопа.
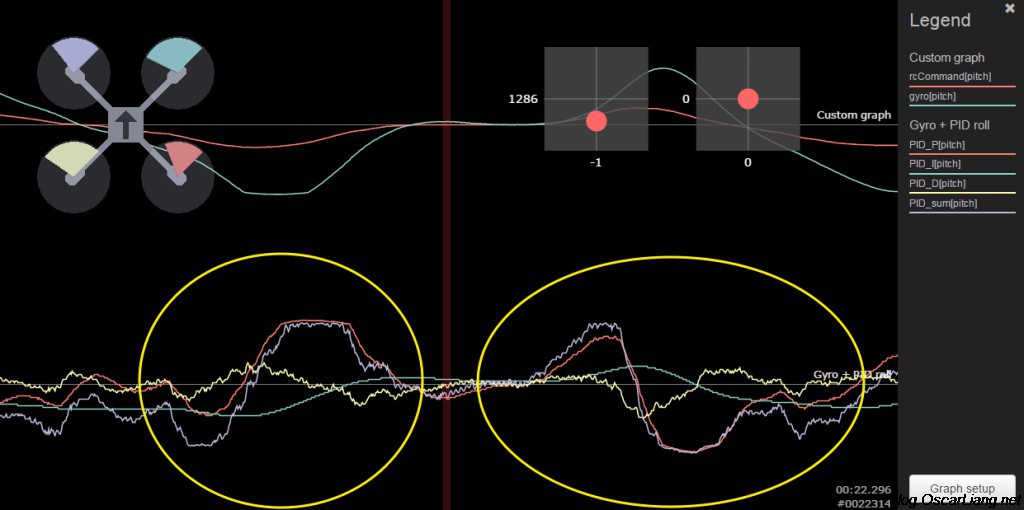
Крен/тангаж (Roll/Pitch), значение D
Я предпочитаю настраивать в 2 этапа. Кроме анализа графиков, вы должны также проверить запись с камеры, если есть отскоки в конце флипов и ролов. Если вас это устраивает, то нет необходимости увеличивать D.
Пример низкого значения D
Представьте квадрик делающий отскок после резкого флипа или рола.
Здесь я увеличил D. Теперь значение D близко к значению P. В вашем случае может увеличиться уровень шума, но я везунчик и у меня не все так плохо. Некоторые коптеры шумнее других по разным причинам, как электрическим, так и механическим.
Теперь я иду на улицу и снова летаю, если я замечу отскоки, то увеличу D еще немного, если отскоков не будет – значит все хорошо.
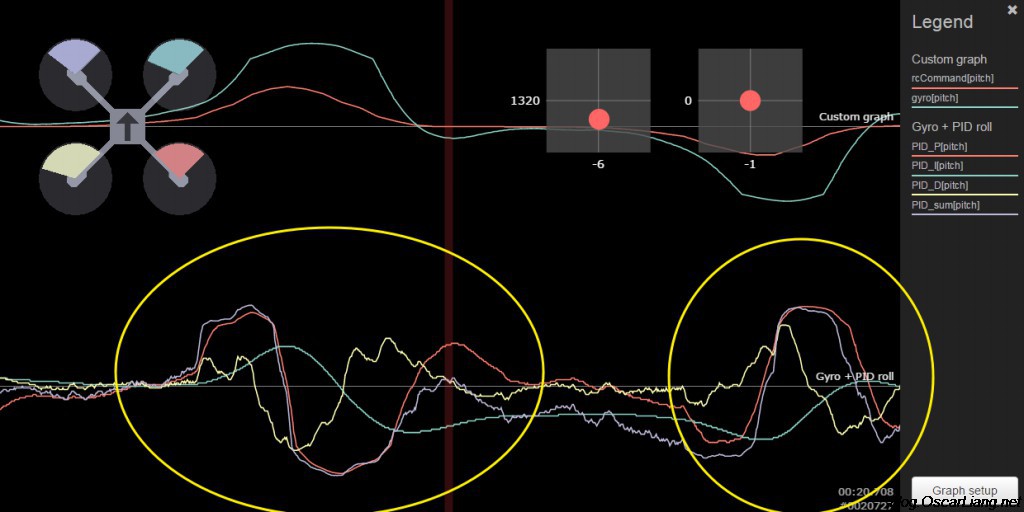
Еще один хороший пример график крена/тангажа P, после настройки (увеличил D) во втором тесте.
Рысканьше (Yaw) значение P и D?
Практически также как для тангажа и для крена, увеличение P по рысканью даст вам лучший отклик на стики, но может вызывать промахи. Если у вас есть дрейф по рысканью, тогда увеличьте I, но старайтесь держать I как можно меньшим. Так же как и D, значение обычно небольшое, где-то 5-10.
P по рысканью показывает некоторые колебания на графике, но это нормально, и не должно сильно влиять на полет. Колебания по рысканью появляются потому что коптер не имеет эффективного управления по этой оси.
Так же я заметил, что, при прочих равных условиях, меньшая рама, меньший шаг винта или более высокий kv двигателя дадут более плавный график по yaw. Это значит что колебания связаны с эффективностью управления по рысканью.
График для моего EVO250 с двигателем 1960KV и винтами 6045.
А это мой Ghost220, двигатели 2300KV, винты 5045
Оба квадрика летают отлично. Колебания по рысканью это не конец света. Шум уменьшился на моем 250м квадрике, когда я уменьшил P для рысканья, но управление стало немного менее отзывчивым и плавным, я так не люблю.
Нужна помощь с настройкой?
Присоединяйся к нашей группе http://multicopterfpv.com/ и загружай логи если хочешь.
Основы настройки ПИД контроллера с помощью логов Blackbox : 2 комментария
Пhttps://blog.rcdetails.info/vybiraem-poletnye-kontroller-dlya-kvadrokoptera/
> Флэш память для черного ящика (blackbox). У некоторых ПК имеется встроенная память, у других — внешние логгеры (open logger) с microSD карточками. Если вы не планируете использовать blackbox для настройки, тогда пропустите этот пункт.
Спасибо, полезный блог, а в чем все-таки основные отличия между open logger и microSD?
Сам не использовал, но судя по характеристикам: это довольно универсальное решение, не только для Betaflight/Cleanflight, т.к. подключается через последовательный порт.
Количество последовательных портов ограничено, и для большой скорости записи они не очень подходят.
Гоночный FPV-дрон своими руками (часть 2) — настройка
В первой части я рассказал, как собрать квадрокоптер для FPV-полётов. Теперь настало время его настроить. Если интересно, вэлкам под кат.

Сразу оговорюсь, что я совершенно не претендую на роль эксперта, это всего лишь третий собранный мною квадрокоптер. Вдобавок, настройка — вещь весьма субъективная. Тем не менее, я надеюсь, что кому-то статья будет полезна и поможет сэкономить время.
Перейдём непосредственно к настройке. Сначала более простые вещи, а потом — его величество полётный контроллер.
Прошивка и настройка MinimOSD
Наиболее популярной (но не единственной) прошивкой для MinimOSD является MWOSD. Сначала нужно прошить ей плату, а потом ещё и настроить. Если настроить OSD можно через ПК (подробнее об этом в разделе, посвящённом настройке ПК), то для прошивки необходим FTDI-адаптер или Ардуинка. Как это сделать через FTDI-программатор, а главное где взять для него старые драйвера, показано в этом видео. Главное, не забыть перед прошивкой раскомментировать в Config.h следующие строки:
#define MINIMOSD
#define CLEANFLIGHT
Из параметров выводить на экран я стал только напряжение батареи, время полёта и выбранный полётный режим.

Прошивка и настройка регуляторов
Для прошивки регуляторов у меня тоже есть специальный USB-адаптер, но можно обойтись и без него, подключившись через ПК. Долго думал, ставить Multishot или уже проверенный Oneshot125? С одной стороны, на устаревшем чипе F330 в скорости особой разницы не заметно, с другой — мелодия из «Звёздных войн» при включении и, как пишут на форумах, «более чистый сигнал». Решили всё неединичные жалобы на то, что моторы стихийно начинают вращаться на максимальных оборотах при подключении к CLI. В итоге поставил BLHeli последней версии (на момент сборки 14.5), включил Damped Light и выставил Motor Timing на «Medium». Позднее откалибровал регуляторы по этой инструкции.
Прошивка полётного контроллера
На этом этапе я застрял дольше всего, так как были проблемы с прошивкой. Оказалось, первый раз шить надо обязательно с замыканием boot-контактов (как в этом видео). Кстати, иногда бывает, что ПК защищён от записи и невозможно прошить новую прошивку. Вот инструкция, как это исправить.
Пожалуй, самой популярной прошивкой на сегодняшний день, вполне заслуженно, является Cleanflight. После её установки достоточно только настроить протокол приёмника и квадрокоптер уже может вполне сносно лететь. Для настройки используется удобная графическая оболочка Cleanflight Configurator.
Благодаря открытому коду прошивки, у неё есть несколько ответвлений (форков). Самым интересным из них является Betaflight от человека под ником Boris B. Прошивка очень динамично развивается и некоторые её «фичи» потом переходят в «родительский» Cleanflight (например, полётный режим Airmode). Минусом Betaflight является то, что релизы выходят достаточно часто, а стабильность их не всегда высока. Кстати, эта причина на несколько недель задержала написание данной статьи. На момент завершения сборки квадрокоптера как раз вышла версия 2.8.0, которая имела пару ошибок и отличалась недружелюбными дефолтными настройками. Очень быстро появилась исправленная версия 2.8.1 RC1, но опыт работы программистом подсказал мне, что лучше подождать релиза. Я не прогадал, так как одновременно с релизом версии 2.8.1, появился и Betaflight Configurator. Можно сказать, что это новый этап в истории данной прошивки. Дело в том, что по мере своего развития Betaflight всё больше и больше отдалялся от Cleanflight и конфигуратор последнего становился всё более и более бесполезным, так как основная часть настроек всё равно делалась через консоль CLI. Кстати, на момент подготовки этой статьи, уже вышла версия Betaflight под номером 2.9.0, но из-за негативных отзывов я не стал обновляться до неё.
Ниже я подробно опишу, как я настроил свой квадрокоптер через Betaflight Configurator.
Настройка ПК через Betaflight Configurator
Вкладка Setup
Сделал калибровку акселерометра.
Вкладка Ports
Вкладка Configuration
Собственно тут и производятся почти все настройки.
Вкладка Failsafe
Вкладка PID Tuning
Вкладка Modes
Вкладка LED Strip
Настроил свою подсветку на отображение предупреждений, индикацию поворотов/торможения и свечение синим цветом, когда ничего из этого нет.
Вкладка Blackbox
Blackbox — это «чёрный ящик» квадрокоптера. Нужен для диагностики, более точной настройки PID, а также чтобы можно было наложить инфографику на полётное видео (как тут). Данные пишутся на внешний логгер или, если того позволяет объём памяти, на внутреннюю память ПК. Например, у Naze32 Acro её недостаточно, а у Naze32 Deluxe и SPRacingF3 Acro — хватает, хотя и не намного. При настройках по умолчанию, на 2Мб памяти можно записать данные полёта продолжительностью 3-4 минуты, что весьма мало. Усугубляет ситуацию то, что реализовать запись «по кругу», как в автомобильных регистраторах, здесь невозможно из-за низкой скорости чтения/записи памяти. Единственный вариант — уменьшить в несколько раз скорость записи. Для диагностики такие данные уже будут малопригодны, а для видео — самое то. В этой вкладке я сделал следующее:
Вкладка CLI
CLI — это консоль, через которую можно менять уже более продвинутые настройки, а также делать резервную копию всех настроек. Я сделал следующее:
set small_angle = 180 # Включить возможность армить моторы даже в перевёрнутом состоянии
set vbat_pid_compensation = ON # Включить компенсацию PID при разрядке батареи
save # Сохранить настройки
Также в Betaflight есть очень полезная возможность подключения к OSD через ПК. Теперь можно запрятать эту платку подальше, не беспокоясь, что к ней может понадобиться подключиться. Для подключения к плате OSD через ПК необходимо подключить батарею к квадрокоптеру, затем набрать в CLI команду serialpassthrough с необходимыми параметрами, затем отключить (Disconnect) Betaflight от ПК и запустить MWOSD. У меня получилось с первого раза. По поводу параметров, то для Micro MinimOSD, подключенной к UART2 (мой случай) они таковы:
serialpassthrough 1 115200
На этом настройка полётного контроллера закончена.
Настройка передатчика
Передатчик (он же “пульт») каждый пилот настраивает индивидуально: таймеры, миксы, голосовые уведомления и прочее. Единственная вещь, сделать которую крайне желательно, это проверить минимальные, средние и максимальные значения стиков управления в конфигураторе. Делается это во вкладке Reciever. Идеальные значения составляют 1000 — 1500 — 2000. В моём случае они составляли 996 — 1508 — 2020, что не очень хорошо. Во-первых, «выпадения» за пределы диапазона (значения менее 1000 и более 2000) плохи сами по себе. Во-вторых, центральное положение, отличное от 1500, будет восприниматься ПК, как лёгкое подруливание, которое он будет отрабатывать и квадрокоптер постоянно будет сносить в какую-то сторону. Словом, имеет смысл повозиться и настроить «как надо».
Как настроить эти значения на передатчике Taranis, показано здесь. У меня Turnigy 9XR PRO, там это делается в пункте Limits. Также можно выполнить настройку через программу eePskye (вкладка Limits), но это неудобно, так как результат сразу не видно в Betaflight Configurator. Сделать это необходимо для каждого из четырёх каналов управления.
После настройки центральные значения максимально приблизились к 1500, но у меня они начали «прыгать» примерно на 5 единиц в одну или другую сторону. Не знаю, с чем это связано, вероятно, значения пульта являются пограничными для ПК и после их округления получается такой эффект. Для решения этой проблемы в Betaflight (и CleanFlight тоже) есть специальная команда, настраивающая фильтрацию подобных вещей.
Значение может быть от 0 до 32 и с его повышением чувствительность управления снижается. Управление становится более мягким. Надо понимать, что после определённого порога мягкость превратится в ватность, поэтому для себя я выбирал минимальное значение, при котором дёрганья исчезли.
На этом всё, удачных полётов!
Blackbox betaflight что это
Betaflight Blackbox Explorer

![]()

This tool allows you to open logs recorded by Betaflight’s Blackbox feature in your web browser. You can seek through the log to examine graphed values at each timestep. If you have a flight video, you can load that in as well and it’ll be played behind the log. You can export the graphs as a WebM video to share with others.
Download the installer from Releases.
The minimum required version of Windows is Windows 8.
Unstable Testing Versions
Unstable testing versions of the lates builds of the Betaflight Blackbox Explorer for most platforms can be downloaded from here.
Be aware that these versions are intended for testing / feedback only, and may be buggy or broken.
Click the «Open log file/video» button at the top right and select your log file and your flight video (if you recorded one).
You can scroll through the log by clicking or dragging on the seek bar that appears underneath the main graph. The current time is represented by the vertical red bar in the center of the graph. You can also click and drag left and right on the graph area to scrub backwards and forwards.
Syncing your log to your flight video
The blackbox plays a short beep on the buzzer when arming, and this corresponds with the start of the logged data. You can sync your log against your flight video by pressing the «start log here» button when you hear the beep in the video. You can tune the alignment of the log manually by pressing the nudge left and nudge right buttons in the log sync section, or by editing the value in the «log sync» box. Positive values move the log toward the end of the video, negative values move it towards the beginning.
Customizing the graph display
Click the «Graph Setup» button on the right side of the display in order to choose which fields should be plotted on the graph. You may, for example, want to remove the default gyro plot and add separate gyro plots for each rotation axis. Or you may want to plot vbat against throttle to examine your battery’s performance.
Native app build via NW.js
App build and release
The tasks are defined in gulpfile.js and can be run through yarn:
List of possible values of :
[1] Running this task on macOS or Linux requires Wine, since it’s needed to set the icon for the Windows app (build for specific platform to avoid errors).
Setting up and building on a Mac
(The GitHub Desktop application should come to the front and create a repository (not necessarily where you want it). The blackbox-log-viewer repository (folder) should appear under the list of local repositories. You can find your local repository location on your mac using the ‘Locate in Finder’ command GitHub Desktop It can be moved somewhere more else, but you’ll then need to tell Github where you’re moved it to.)
Open Terminal.app and install or update homebrew:
install node 8.x and yarn, if already installed, agree to update them
Change Terminal’s working directory wherever you put blackbox-log-viewer folder; easiest way is to type ‘cd ‘ in Terminal then drag the blackbox-log-viewer folder from the Finder to the terminal window. Or use a terminal command like
install dependencies into that folder (ignoring many confusing messages) with:
finally build the DMG itself, which will end up in blackbox-log-viewer/release/, with:
Build or release app for one specific platform
macOS DMG installation background image
Flight video won’t load, or jumpy flight video upon export
Some flight video formats aren’t supported by Chrome, so the viewer can’t open them. You can fix this by re-encoding your video using the free tool Handbrake. Open your original video using Handbrake. In the output settings, choose MP4 as the format, and H.264 as the video codec.
Because of Google Bug #66631, Chrome is unable to accurately seek within H.264 videos that use B-frames. This is mostly fine when viewing the flight video inside Blackbox Explorer. However, if you use the «export video» feature, this bug will cause the flight video in the background of the exported video to occasionally jump backwards in time for a couple of frames, causing a very glitchy appearance.
To fix that issue, you need to tell Handbrake to render every frame as an intraframe, which will avoid any problematic B-frames. Do that by adding «keyint=1» into the Additional Options box:

Hit start to begin re-encoding your video. Once it finishes, you should be able to load the new video into the Blackbox Explorer.



